降压-增压恒流LED驱动方案设计

为了优化性能,高亮LED需用电流源而非电压源来驱动。本文我们将了解一种恒流LED驱动方案,它可以用于驱动一条串联的LED串。
本文引用地址:https://www.eepw.com.cn/article/168278.htm为了驱动LED串,我们采用改进后的降压-增压转换器电源拓扑,将LED串置于DC-DC转换器输出端和输入电压源之间。运用这种连接方式,可以为LED串提供低于或高于输入的驱动电压。
虽然LED串两端的电压存在降压-增压转换器提供的直流增益,但其输入电流是非脉动方式,这不同于典型的降压-增压转换器的脉动输入电流,非脉动电流有效降低了EMI。本文所讨论的PWM控制器采用平均电流控制模式。
图1所示LED驱动器有如下直流特性:

(1)
由于
 ,
,
此处D为占空比

(2)
在平均电流控制模式下,输入电流由输入电压返回环路的检流电阻检测(图2)。该电压送入电流误差放大器(CEA)的反相输入端。放大器的同相输入端连至电流控制电压。误差信号经过放大器放大后,驱动PWM比较器的输入端,与开关频率的斜坡信号进行比较。电流环路的增益带宽特性可通过CEA附近的补偿网络进行优化。
电流环路补偿设计
业内已经有多种集成驱动方案,为了帮助用户选择方案,我们对MAX16818集成控制系统进行了检验。这个平均电流模式控制器利用跨导放大器(transcONductance amplifier)放大电流误差信号。检流电阻两端的电压由内部放大器放大34.5倍,电流误差放大器的跨导是550 uS,锯齿波信号峰值为2V。该电路中,输入电流在返回通路上由电阻Rs检测(图3)。
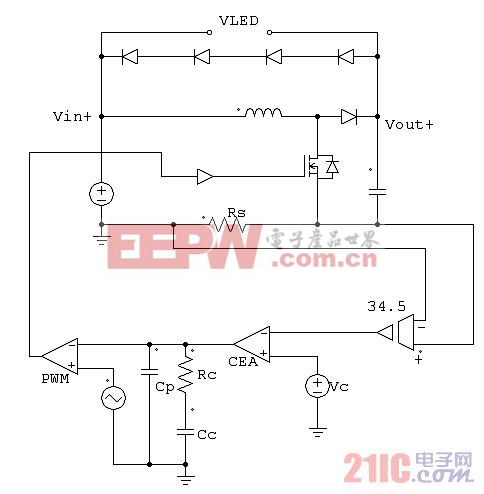
图3:利用MAX16818(内部电流环路)构建的高亮LED驱动器。
电流检测电阻值由平均电流极限设置,LED支路的最大电压为:

此处n是LED的数目,Vfm(If)是LED在满负荷电流If下的最大压降。
最大输入功率为Pmax = VLED(max) ×IfVLED(max) ×I f,效率为η。因而,最大输入电流为:
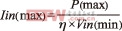 (1)
(1)
最小平均电流阀值为24mV,因而,电流检测电阻值为:
 (2)
(2)
为了避免控制器的PWM比较器输出自激,比较器反相输入信号的斜率应小于同相输入的锯齿波斜率。锯齿波斜率为Vs×fs,电流误差放大器的增益为GCA。
 (3)
(3)
式中,gm是CEA跨导,放大器输出为PWM比较器的反相输入。PWM比较器的同相输入是锯齿波,峰值为Vs、开关频率为fs。这是电流误差放大器从Rs检流电压到放大器输出在高频端的交流增益,频率低于补偿电容Cp产生的极点。这是PWM比较器敏感频点处的增益。
电流误差放大器的最大增益GCA由下式(4)决定:

(4)
VLED(max)/L是输入电流的下降斜率。
从等式(4)我们可以得出Rc的最大值为:
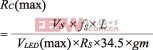
(5)
由RcCc决定的零点频率要低于电流环路的交越频率fc(crossover frequency),且要留有足够的相位余量,这是确定Cc值的标准。LED驱动器功率电路的小信号等效模型由下面推导的公式表示。

升压调节器电流环路的小信号控制到输出增益,即从CEA输出vca到Rs电压vRs的表达式为:

(6)
式中:Rs为电流检测电阻,L为输入电感值
Il是电感的直流电流











评论