带跟瞄功能的视觉眼孔通信模型研究

1 引言
本文引用地址:https://www.eepw.com.cn/article/167005.htm一般机器人具有视觉、力触觉,而发射眼孔波的视觉机器人几乎未见报导。机器人视觉识别和发射眼孔波之后,按眼孔波信息,机器人力触觉传感器可以进行相应动作。用视觉进行识别,用眼孔波发射信息。
眼孔可以发出眼孔波,眼孔波含有信息,据此首次提出机器人视觉系统眼孔波通信框架,以下简称眼孔波通信框架,这种眼孔波通信跟瞄数学上同时给出其数学表达。
眼孔波信息传送可以用大气激光通信系统在机器人中的应用方法实现。眼孔波握手的方法:
1、 发起者开始捕获序列,发出眼孔波,它的位置和特性被接收者捕获、跟踪、瞄准。
2、 接收者回答,发出眼孔波,他的位置和特性被发起者捕获、跟踪、瞄准。
3、 发起者开始眼孔波数据传输。
机器人视觉可以同时使用眼孔波通信方法,本文该技术开辟了视觉光通信的新阶段。本文将小型大气光通信系统引入机器人视觉系统中,并通过研究自动捕获,使视觉通信实现自动化,发射接收端可以实现双向通信,从眼孔波自动获取短距离信息以操纵机械手工作。
2 捕获方法:信标光捕获研究
在捕获过程中激光器或探测器应当覆盖不确定区域,当激光束被接收端探测到时,开始时有一个初始瞄准误差,为了能够开始通信,它应当被减少至所需的瞄准误差。在发射端和接收端可以采用基于角度分析的多种捕获方法[1-2],在测量距离为Z的条件下,根据靶面尺寸正态瑞利分布特性,本文提出从尺寸角度将捕获分成两种方法见图1、图2:
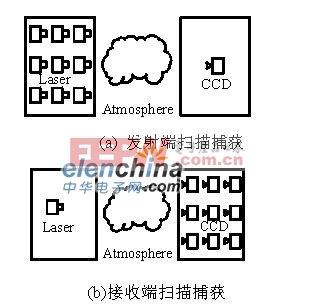
图1 捕获方法
捕获见图2:

图2 Yu捕获示意图
关于手动捕获:对远处的通信机进行视觉眼孔观察信标光捕获。在一定角度或靶面尺寸范围内进行。
关于自动捕获:对远处的通信机进行自动信标光捕获。在一定角度或靶面尺寸范围内进行。
1、发射端扫描捕获方法
当第一阶段无法捕获时,保持FPA(CCD)接收端不动,发射端用发散角狭窄的信标光激光束在不确定的区域扫描。在捕获距离为Z的条件下,捕获时间依赖于不确定区域尺寸对可探测光束尺寸的比例乘以在每个点的滞留时间。由于不稳定抖动的影响,为了增加额外的边际安全,搜索过程在扫描区域之间存在着交迭,光束发散尺寸被交迭的因子修正。当信标光激光束被接收端探测到时,开始时有一个初始瞄准误差如图1(a) 所示。此时捕获取景完成。
2、接收端扫描捕获方法
保持发射端的信标光激光束不动,FPA(CCD)接收端在不确定的区域扫描视场。在捕获距离为Z的条件下,捕获的时间依赖于不确定区域尺寸对可探测光束尺寸的比例乘以在每个点的滞留时间。由于不稳定抖动的影响,为了增加额外的边际安全,搜索过程中在扫描区域之间存在着交迭,光束发散尺寸被交迭的因子修正。当信标光激光束被接收端探测到时,开始时有一个初始瞄准误差如图1(b) 所示。此时捕获取景完成。



评论