基于CAN总线的分布式监控系统智能节点设计
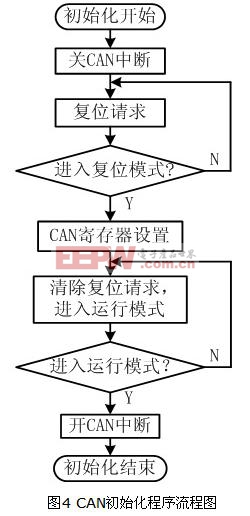
监控节点的通信采用CAN总线2.0A协议,通信模块的软件设计主要由初始化程序、发送程序、接收程序三部分组成。其中初始化程序是实现通信的关键,它主要用来完成CAN控制器工作方式的选择,即对P87C591中CAN控制器控制段中的寄存器进行设置,包括:总线定时寄存器和输出控制寄存器设置;接收验收滤波寄存器和滤波屏蔽寄存器设置;设置发送数据帧类型(标准帧或扩展帧)、标识符、数据长度。初始化过程是在CAN控制器复位模式下完成的,监控节点通信的初始化程序流程如图4所示。
本文引用地址:http://www.eepw.com.cn/article/163647.htm
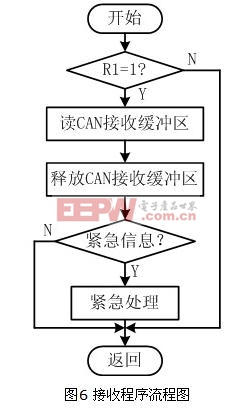
监控节点与CAN总线之间的数据交换是通过发送程序和接收程序实现的。发送程序流程如图5所示,从图5中可以看出系统的每个节点采用定时中断的方式主动向监控计算机发送数据。这是利用了CAN总线可以采用多主机方式通信的特点。由于实时监控功能是由各个控制节点完成,而监控计算机主要用来实现管理功能,所以采用了定时上传数据的方法,而没有实时上传所有传感器采集到的数据,从而减轻了总线负担。这也是分布式控制方法相对于集中控制方法的一个优点。图6为接收程序流程图,接收缓冲区用来存放CAN总线上发来的数据,CPU读取数据后接收缓冲区将被清空,等待接收新的数据。

5结束语
本文设计的基于CAN总线的分布式监控系统智能节点经过现场调试,可以对潜水电机运行过程中出现的过流、过热、短路、渗漏情况做出处理,对电机起到了保护作用;节点与上位计算机之间的数据通信稳定可靠;可以通过现场设置模块修改节点的参数。实验表明了节点的适用性和可靠性,开发过程中所提出的技术方案和实现方法可以在分布式监控系统及工业底层监控网络的现场智能节点设计中推广应用。
本文作者创新点:设计了一种基于P87C591的智能监控节点,在软/硬件设计中均采用了模块化的结构,具有高度的灵活性和广泛的适用性。















评论