基于ARM的电脑鼠走迷宫的研究
3.1 迷宫搜索主程序
在没有预知迷宫路径的情况下,电脑鼠必须优先探索迷宫中的所有单元格,直到抵达终点为止。做这个处理的电脑鼠要随时知道自己的位置及姿态,同时要记录所有访问过的方块四周是否有墙壁,并且在搜索过程中尽量避免重复搜索它搜索过的地方。迷宫搜索流程图如图3所示。本文引用地址:http://www.eepw.com.cn/article/162073.htm
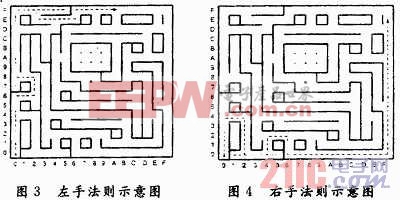
3.1.1 左手法则
电脑鼠在前进的方向上存在两条和两条以上支路时,优先考虑左转,其次是向前,最后才考虑向右。示意图如图4所示。
3.1.2 右手法则
电脑鼠在前进方向存在两条和两条以上的支路时,优先考虑右转,其次向前,最后才向左。示意图如图4所示。
3.1.3 求心法则
求心法则就是当电脑鼠有至少两个方向可以选择时,则优先转向离中心点最近的方向前进。如图5所示,把迷宫分为对等区域(1,2,3,4)。可以观察出,在区域1中,电脑鼠向右和向上更能接近中心,其他区域同理。如果电脑鼠可供选择的前进方向包含两个都有可能是离迷宫中心点最近的方向时,优先选择可以直接前进的方向,其次选择只用转90°的方向前进。如果可前进方向都是远离中心点的方向时,优先选择直线运行方向,其次选择转弯90°的方向。其搜索示意图如图6所示。

3.2 其他功能子程序
3.2.1 路程检测子程序
通过安装在两轮内侧的红外线收发管和黑白码盘来测算电脑鼠走过的路程,确定电脑鼠在迷宫中的位置,并在岔口实现精确的90°和180°转弯。
3.2.2 岔口检测子程序
由安装在正前、左前、右前方向的3个红外发射管发射38 kHz的信号完成远距检测,根据传感器读入值,判断迷宫中障碍信息、路口信息。
3.2.3 姿势修正子程序
根据左右两侧红外传感器接收的反馈信号来判断电脑鼠偏离迷宫巷道中轴线的程度,通过调整步进电机工作脉冲使某一边电机减速来修正电脑鼠的行驶方向,使其基本行走在中轴线附近。
3.2.4 转弯子程序
当电脑鼠检测到岔口,且需要转弯时,调用该子程序。
3.2.5 最优路径子程序
通过对迷宫环境进行搜索检测,数组自动记录迷宫地图信息以及迷宫中每一单元格到起始点的路程,运行最优路径子程序,就能找到一条从始点到终点的最短路径。其实质是一种路径优化算法,常用的算法有等高图法和蚁群算法。
3.2.6 冲刺子程序
调用此程序可使电脑鼠循着最短路径从起点以最快的速度冲到终点。
4 结语
本文从分析“IEEE标准电脑鼠”走迷宫比赛规则入手,介绍了电脑鼠硬件系统和软件系统设计过程和流程。基于电脑鼠的产品具有广泛的应用场合,譬如自动盲人导引小车、足球机器人、灭火机器人、影像机器人等等。随着电子技术的发展,对电脑鼠的深入研究将具有很好的发展和应用前景。











评论