基于LEA-6R的惯性导航系统设计与实现
1.4 LEA-6R监测保护功能
(1)有源天线电源的供给。有源天线可独立的外部供电,也可使用GPS的工作电压。在使用GPS的工作电压时,工作电压Vcc经芯片内部的FB由Vcc_RF输出,Vcc_RF通过外接电阻R2至V_ANT,V_ANT经由芯片内部开关和FB,经由RF_IN输出,和同轴电缆的接地屏蔽层一同提供给有源天线。
(2)短路保护时的工作过程。当有源天线内部发生短路时,流经R2的电流增大,当ANTSHORT检测到电流过大时,由ANTOFF断开开关,切断电源通路。
(3)开路保护时的工作过程。当天线开路时,电流经R2流向T2,T2导通,AADET_N引脚上的电压上升为2.9 V,GPS在检测到AADET_N为高电平时,即可根据事先设置采取相应的动作。
1.5 外部传感器电路
外部传感器为GPS接收信号微弱或卫星信号不可见时提供了必要的信息。在卫星不可见时,陀螺仪、方向传感器、温度传感器和GPS卫星定位的最后一次数据在LEA-6R中进行运算,从而得出定位的数据。因此外围传感器是惯性导航系统中较为重要的一部分,电路如图3和图4所示。本文引用地址:http://www.eepw.com.cn/article/159771.htm
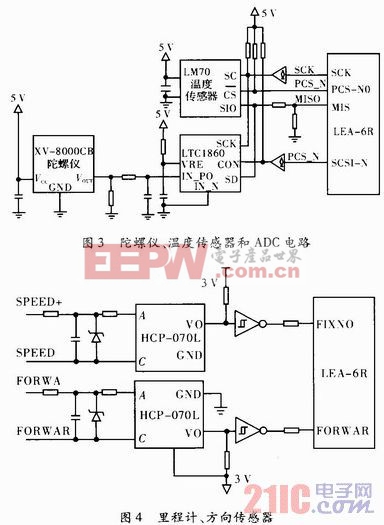
XV-8000CB陀螺仪的工作电压是5 V,输出模拟电压经LTC1860的ADC模数转换成12位数字信号,通过SPI串行总线送入LEA-6R,经SPI总线传输数据的还有LM70温度传感器。SPEED的数据由里程计,或由车内的OBD口输出,经HCP-070L光电隔离、整型后送入LEA-6R。经LEA-6R内部运算后的定位数据直接由LEA-6R的串口或USB口输出,输出的数据格式符合NMEA协议或者U-Blox公司的UBX协议。
1.6 LEA-6 R的协议
LEA-6R支持NMEA-183标准协议和U—Blox公司专用的UBX协议。两种协议可以互相切换。UBX协议的结构如图5所示。

其中,Sync char1 Sync char1为2 Byte UBX协议的特征符,分别为OXB5和OX62;CLASS为定义了信息的子集,UBX协议将所有可交换信息都进行了分类(Class);ID为每一类子集所属信息的信息编号;LENGTH LittleEndian为有效数据的长度,表示的时候是低位在前高位存后。长度包括特征符,Class,ID,和校验字节;Payload为变量长度字段;CK_A,CK_B为16位的校验字段。













评论