无刷直流电动机调速系统的混合模糊PID控制
模糊控制规则是专家的经验和操作者的技能加以总结而得出的模糊条件语句的集合,此集合能够保证控制器输出能使系统的动静态特性最佳,本文设计的系统需要有两个规则库,即模糊PID控制器的模糊规则库A和模糊变积分参数的规则库B。在整个控制过程中,先在模糊规则库A中进行模糊PID控制,再使用规则库B进行PID控制向误差零点逼近,实际控制过程中两组规则库同时使用。根据BLDCM调速系统的特点和大量仿真实验得出模糊控制规则如表1所示。本文引用地址:http://www.eepw.com.cn/article/159318.htm

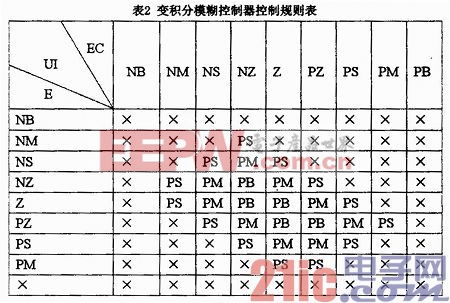
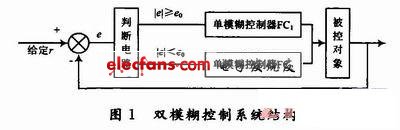
BLDCM调速前期,由于误差较大,Ki为零,系统主要是模糊控制,使系统有很好的鲁棒性,这时以规则库A为控制规则。调速后期,速度基本接近于给定速度,误差接近于零点时,误差e较小,这时系统切换为模糊PID控制,此时使用规则库A和B,对积分环节的参数实现在线调节,避免系统在切换过程中出现的“毛刺”,改善系统的控制性能。故在设计规则库B时考虑系统误差为零且超调量小。规则库B如表2,表中“×”为积分控制死区,由模糊控制实线,即调速前期工作段。
3 系统仿真实验
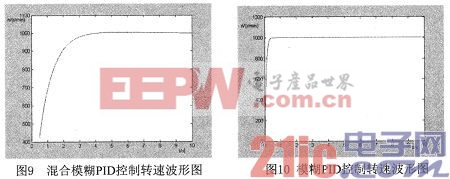
在Matlab中进行仿真实验,其中速度环调节用本文设计的混合模糊PID控制器结构BLDCM控制系统从启动到稳态运行的仿真结果如图9与图10所示。仿真结果表明,采用混合模糊PID控制算法,系统的动静态及稳定性能都比模糊PID控制方法具有一定的优越性。
4 结论
本文提出将模糊变积分参数的模糊控制与PID算法相结合的一种新型控制器应用于BLDCM的速度环控制。仿真结果表明:系统的响应速度加快,没有超调和震荡,调节精度提高,具有较强的鲁棒性,抗干扰能力好,这是单纯的混合PID控制难以实现的系统特性,特别是对于非线性系统可以得到满意的控制效果。

pid控制相关文章:pid控制原理
pid控制器相关文章:pid控制器原理


评论