基于CAN通信的卡车语音报警器的设计

汽车诊断技术是汽车安全技术中不可缺少的一部分,它能在汽车发生故障时及时地进行语音报警,避免事故的发生。CAN即控制器局域网,是国际上应用最广泛的现场总线之一。由于CAN总线技术的优良特性,在汽车电气系统以及其他一些实时控制单元中得到广泛应用。一种基于CAN总线的通信网络具有速度高、抗噪性强及通用性好等优点。
本文引用地址:https://www.eepw.com.cn/article/157686.htm我们设计的基于CAN总线技术的卡车语音报警系统能给汽车乘员提供一个安全的驾乘环境。该语音报警系统采用了摩托罗拉公司的M68HC908GZ16微控制器,该微控制器尺寸小,资源齐全,具有很高的性价比。
CAN总线位定时
CAN总线采用同步串行通信方式,数据流中的字符与字符之间、字符内部的位与位之间都同步,这就要求收/发双方必须以同步时钟来控制数据的发送和接收。要在相当长的数据流中保持位同步,接收端必须能识别每个二进制位是从什么时刻开始的,这就是位定时。通常为保证接收器时钟和发送器时钟严格一致,采用接收器通过解调器从数据流中提取同步信号,或者接收器和发送器使用统一的时钟的方法。但是即便这样,仍然很难解决总线传输延时问题。针对以上问题, CAN总线的位定时改进了位编码/解码。
CAN总线位定时由4部分组成:同步段(SYNC_SEG)、传播段(PROP_SEG)、相位段1(PHASE_SEG1)和相位段2 (PHASE_SEG2)。同步段用于同步总线上的各节点,在此段等待一个跳边沿;传播段用于补偿网络内的物理延迟时间;相位段1及相位段2用做补偿相位误差。在采样点读总线电平。
M68HC908GZ16微控制器(见图1)中内置CAN控制器,提供了波特率控制寄存器;SJW(重同步跳转宽度)决定了一次重同步期间一个位时间被延长或缩短的时间量子;BRP为波特率预分频系数;Spl(采样模式位)决定对有效位采样的次数。
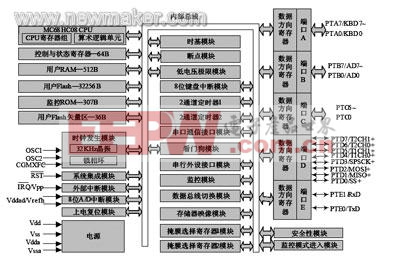
图1 MC68HC908GZ16的内部结构










评论