基于WinCE环境的CAN适配卡驱动程序的设计与实现
从引言部分可知,流接口可以为各种设备提供统一的访问接口,可以是字符设备、块设备、虚拟设备和网络设备等。CAN适配卡驱动程序的主要流程为[5]:应用程序调用函数CreateFile获取CAN设备句柄,文件系统将会调用CAN驱动例程中的CAN_Open来响应应用程序的请求。当应用程序调用ReadFile函数读取CAN设备上的字符时,文件系统将会调用CAN驱动例程中的CAN_Read函数来读取CAN设备上的字符。
对于本文流接口的驱动程序而言,是通过实现如下几个模块来实现驱动的:CAN_Open、CAN _Close、CAN _Read、CAN _Write、CAN _IoControl和CAN _Init等模块。其中CAN _Init模块是系统启动时由文件系统自动调用的,主要完成设备的初始化工作。另外,对于流接口驱动程序可选函数CAN _PowerUp和CAN _PowerDown,主要实现电源管理的功能。
限于篇幅,本文仅对主要的CAN_Write模块、CAN_Read模块和中断服务线程模块的实现作如下详细详细讨论。
3.1 CAN_Write模块的实现
当CAN适配卡控制器在发送报文时,发送缓冲区对写操作是锁定的,这样CPU必须检查状态寄存器的发送缓冲区状态标志TBS,以确定可以将一个新报文写入发送缓冲区中,当发送缓冲区被锁定(即标志TBS=0)时,CPU周期性地查询状态寄存器,等待发送缓冲区被释放;当发送缓冲区被释放(即标志TBS=1)时,CPU将新报文写入发送缓冲区中,并置命令寄存器的发送请求标志TR,该标志导致发送的启动。一旦发送成功中断产生,表明CAN报文已经发送成功。重复上面的工作就可以完成发送多个CAN报文的工作。CAN_Write模块的流程图如图3所示。
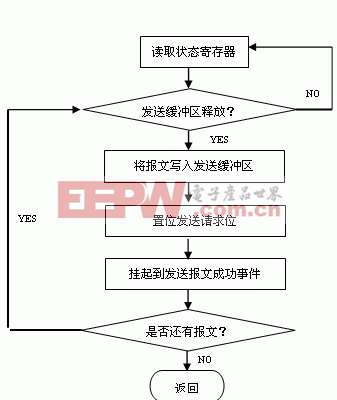
图3 CAN_Write函数的流程图

















评论