基于ARM9的嵌入式仿人机器人传感器系统设计
4 实验验证
4.1 加表实验
由于当机器人倾斜的时候,重力加速度会在加速度两轴上产生分量,这时加速度值为Ax=gsin α和Ay=gsinβ。在加速度计水平放置的时候,Ax=gsin α,由于条件的限制,很难使加速度计达到绝对水平。在α=0附近,sin α变化幅度大,这样会影响标定效果,而在a=π/2附近,sin α变化幅度较小。为了得到较好的加速度计标定效果,采用了竖直标定的方法,即将PCB电路板用细线悬挂起来,分别得到g和-g时的值,通过计算就可得到加速度在0g时的值。由于ADXL202的输出含有高斯白噪声,应用直接采来的数据会有较大的误差,因而需要对采集来的数据进行处理后再加以应用。
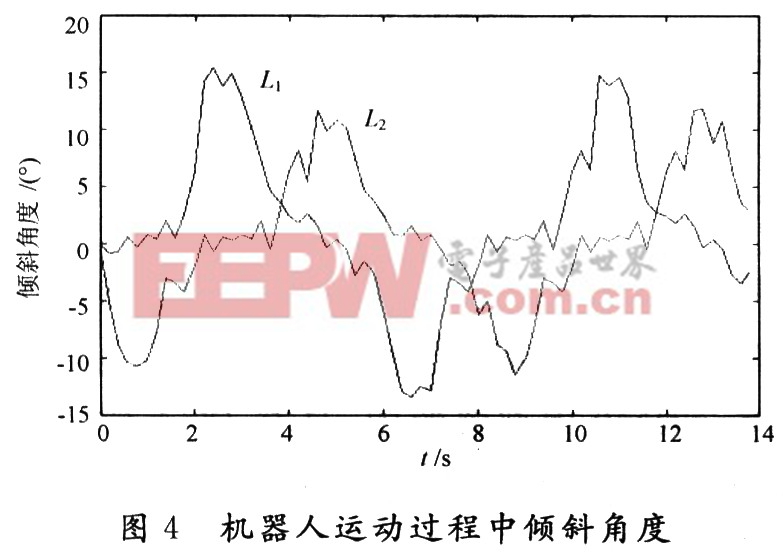
通过平均值滤波可降低噪声的影响,假设Xi为直接采集来的数据,Yi为平均值滤波后的数据,Yi=(∑xi)/n,由概率论知识可知,EYi=EXi,DYi=DXi/n。从中可看出平均值滤波的效果与平均点数n有关,n越大,滤波效果越好。考虑到机器人的运动情况,可取n=15,即噪声的方差变为原来的1/15。图4是DF-1机器人在运动过程中获取的倾斜角度值。其中L1表示了机器人的俯仰角度,L2表示了机器人的横滚角度。本文引用地址:http://www.eepw.com.cn/article/152295.htm
由于DF-1仿人机器人体型较小,运动较为缓慢,在障碍距离测量上,能够对付2 m以内的障碍就可满足应用要求。在2 m以内不同距离上放置平面障碍,利用超声波和红外传感器测量这些距离信息,测得的距离与实际距离如表1所示。

从表中可以看出,超声波测量距离的误差在2%以内,红外传感器测量距离的误差在4%以内,可以满足DF-1仿人机器人的应用要求。
5 结语
本文针对DF-1机器人要实现的功能,基于ARM9微处理器设计了传感器系统。试验结果证明,本传感器系统基本可以满足机器人的功能需求,具有一定的应用价值。具备传感器系统的DF-1机器人对外界环境和自身状态有了一定的感知能力,为上位机进行动作决策提供可靠的依据,提高了机器人的智能性。








评论