基于DSP和CPLD的光纤陀螺信号采集系统设计

摘要:随着光纤陀螺在空空导弹中的广泛应用,为了对其特性进行深入研究,设计了一种光纤陀螺信号采集系统。硬件结构采用了DSP+CPLD的方式,控制AD芯片完成多路光纤陀螺数据的采集。为了降低干扰对采集精度的影响,在硬件以及软件方面进行了抗干扰设计。通过对该系统的测试验证,性能指标满足使用要求。本系统设计新颖、实用,操作简单快捷。
关键词:光纤陀螺;DSP;CPLD;信号采集系统
0 引言
光纤陀螺作为一种新型的惯性器件,近年来得到越来越多的关注,因为它有许多其他陀螺无法比拟的优越性,比如结构简单,精度高,动态范围大,抗电磁干扰,无加速度引起的漂移且成本低,可靠性好等。陀螺可以为载体提供准确的角速度和角位移等信号,完成对运动体的姿态和运动轨迹控制。其优良的品质使自身能够满足军工和民用对惯性器件苛刻的要求,并得到广泛的应用。
惯性器件的性能直接影响到控制系统本身的稳定性能,所以光纤陀螺被应用到空空导弹中时,需要对陀螺的特性有充分的了解,为此构建了一个陀螺采集系统,以实现对陀螺信号的采集及特性分析。
1 光纤陀螺的工作原理
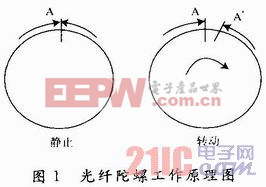
光纤陀螺是激光陀螺的一种,其基本原理基于Sagnac效应,即用光纤绕制成环柱形光路,光源发出的光经过分束器分为两束之后,送到光纤中,随着陀螺的转动,分别沿顺时针和逆时针方向传输,经过一周后,这两束相反方向传播的光回到分束器中形成干涉,当光纤形成的环状回路不转动时,顺、逆光程到达分束器的时间相等,两束光的相位差为零;当环状回路转动时,顺、逆光程就产生差异,在一段时间内分束器已从A点转到了A’点,对顺时针传播的光束,当它再次到分束器时多走了AA’的路程(如图1所示)。可以根据两束光的相位差来获得回路转动的角速度。光纤的检测灵敏度和分辨率比激光陀螺提高了几个数量级。
2 系统构成及其工作原理
本文设计的信号采集系统通过双口RAM实现上位机与DSP的通信,控制板采用DSP+CPLD的方式,控制AD芯片完成多路光纤陀螺数据的采集。系统工作流程为DSP接收到上位机通过双口RAM传来的采集指令,通过地址/数据总线与CPLD进行通信,控制AD芯片对外部的多路陀螺信号进行采集,之后通过双口RAM送到上位机,上位机实现各种图形界面操作和后端信号处理,对所采集的信号进行分析。系统原理框图如图2所示。












评论