鲍哲南院士,再发重磅Science:这次来真的感觉!

人造皮肤可以同时模仿自然皮肤的感官反馈和机械特性,这对下一代机器人和医疗设备具有很大的前景。然而,实现这样一个可以与人体无缝集成的仿生系统仍然是一个挑战。
2023年5月18日,斯坦福大学鲍哲南团队在Science 在线发表题为“Neuromorphic sensorimotor loop embodied by monolithically integrated, low-voltage, soft e-skin”的研究论文,该研究通过对材料性能、器件结构和系统架构的合理设计和工程化,开发了一种单片软性假肢电子皮肤(e-skin)。它具有多模态感知、神经形态脉冲序列信号生成和闭环驱动功能。利用三层高介电常数弹性介质,实现了与多晶硅晶体管相当的低亚阈值摆动、低工作电压、低功耗以及可拉伸有机器件的中等规模电路集成复杂性。该电子皮肤模拟了生物感觉运动回路,当施加压力增加的刺激时,固态突触晶体管会引发更强烈的驱动。 皮肤作为人体与周围世界之间的主要界面和保护层起着至关重要的作用。皮肤的感官能力和机械柔软性的结合不仅使人们能够毫不费力地感知和响应各种外部刺激,而且还使人们能够在动态和非结构化环境中执行复杂的任务。遗憾的是,遭受皮肤损伤或截肢的患者可能会有严重的感知-行动回路紊乱,导致他们甚至在简单的任务(如抓取物体)中存在困难。虽然假肢可以部分恢复运动功能,但其局限性—如幻肢痛、不受控制的运动和较差的灵活性—需要通过结合感觉反馈和组织顺应性来解决。复杂的硅(Si)电路已被开发用于模拟周围神经系统,并在假肢和机器人技术中体现类似皮肤的感知能力。然而,构建一个单片集成的软电子皮肤(e-skin),将所需的电气和机械特征结合在一个单一的设备平台上仍然是一个挑战。尽管在柔性电子和电路制造方面取得了进步,但它们在电子皮肤中的应用仅限于有源矩阵阵列。尽管压电、摩擦电和离子压力传感器可以根据施加的力的频率产生类似脉冲序列的信号模式,但生物感觉受体使用频率调制信号来编码输入的幅度信息。这需要信号数字化和调整电路将传感器的模拟信号转换为尖峰序列信号模式,并需要人工突触调节电流振幅以触发身体运动。
皮肤作为人体与周围世界之间的主要界面和保护层起着至关重要的作用。皮肤的感官能力和机械柔软性的结合不仅使人们能够毫不费力地感知和响应各种外部刺激,而且还使人们能够在动态和非结构化环境中执行复杂的任务。遗憾的是,遭受皮肤损伤或截肢的患者可能会有严重的感知-行动回路紊乱,导致他们甚至在简单的任务(如抓取物体)中存在困难。虽然假肢可以部分恢复运动功能,但其局限性—如幻肢痛、不受控制的运动和较差的灵活性—需要通过结合感觉反馈和组织顺应性来解决。复杂的硅(Si)电路已被开发用于模拟周围神经系统,并在假肢和机器人技术中体现类似皮肤的感知能力。然而,构建一个单片集成的软电子皮肤(e-skin),将所需的电气和机械特征结合在一个单一的设备平台上仍然是一个挑战。尽管在柔性电子和电路制造方面取得了进步,但它们在电子皮肤中的应用仅限于有源矩阵阵列。尽管压电、摩擦电和离子压力传感器可以根据施加的力的频率产生类似脉冲序列的信号模式,但生物感觉受体使用频率调制信号来编码输入的幅度信息。这需要信号数字化和调整电路将传感器的模拟信号转换为尖峰序列信号模式,并需要人工突触调节电流振幅以触发身体运动。
2023年5月18日,斯坦福大学鲍哲南团队在Science 在线发表题为“Neuromorphic sensorimotor loop embodied by monolithically integrated, low-voltage, soft e-skin”的研究论文,该研究通过对材料性能、器件结构和系统架构的合理设计和工程化,开发了一种单片软性假肢电子皮肤(e-skin)。它具有多模态感知、神经形态脉冲序列信号生成和闭环驱动功能。利用三层高介电常数弹性介质,实现了与多晶硅晶体管相当的低亚阈值摆动、低工作电压、低功耗以及可拉伸有机器件的中等规模电路集成复杂性。该电子皮肤模拟了生物感觉运动回路,当施加压力增加的刺激时,固态突触晶体管会引发更强烈的驱动。
皮肤作为人体与周围世界之间的主要界面和保护层起着至关重要的作用。皮肤的感官能力和机械柔软性的结合不仅使人们能够毫不费力地感知和响应各种外部刺激,而且还使人们能够在动态和非结构化环境中执行复杂的任务。遗憾的是,遭受皮肤损伤或截肢的患者可能会有严重的感知-行动回路紊乱,导致他们甚至在简单的任务(如抓取物体)中存在困难。虽然假肢可以部分恢复运动功能,但其局限性—如幻肢痛、不受控制的运动和较差的灵活性—需要通过结合感觉反馈和组织顺应性来解决。复杂的硅(Si)电路已被开发用于模拟周围神经系统,并在假肢和机器人技术中体现类似皮肤的感知能力。然而,构建一个单片集成的软电子皮肤(e-skin),将所需的电气和机械特征结合在一个单一的设备平台上仍然是一个挑战。尽管在柔性电子和电路制造方面取得了进步,但它们在电子皮肤中的应用仅限于有源矩阵阵列。尽管压电、摩擦电和离子压力传感器可以根据施加的力的频率产生类似脉冲序列的信号模式,但生物感觉受体使用频率调制信号来编码输入的幅度信息。这需要信号数字化和调整电路将传感器的模拟信号转换为尖峰序列信号模式,并需要人工突触调节电流振幅以触发身体运动。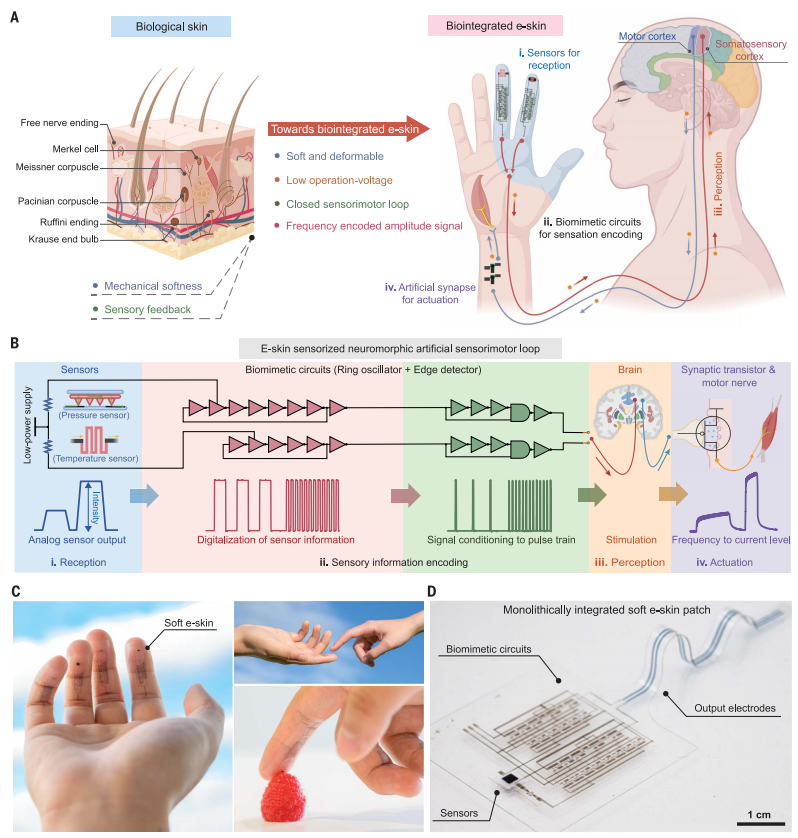
来源:脑机接口社区
*博客内容为网友个人发布,仅代表博主个人观点,如有侵权请联系工作人员删除。
关键词:
鲍哲南