- 摘要 针对板带热连轧机活套的高度和张力系统,在工作点附近,以实际热轧现场数据为依据,建立了对象的动态数学模型.采用基于BP神经网络整定的PID控制策略以减弱系统的耦合影响,并给出了其控制算法在FPGA上实现的方法,包括脉动阵列算法映射、数据表示及精度和运算部件设计.仿真结果验证了本算法的有效性和控制策略的适用性.
- 关键字:
活套系统 解耦控制 数据精度 脉动阵列 FGPA
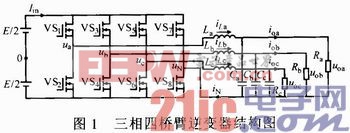
- 三相四桥臂逆变器通常采用空间矢量控制策略,但该方法的空间矢量图抽象,难以理解,控制时需进行坐标变换,且开关矢量带有根号,所以空间矢量控制方法虽然具有电压利用率高、控制灵活、效率高等优点,但控制较为复杂。研究了一种零序电流注入的PWM控制策略。该控制策略不仅能实现三相四桥臂逆变器的解耦控制,且控制方法简单,易于理解和实现。与常规的正弦波调制方法相比,直流母线电压利用率得到了提高,且具有很好的带不平衡负载能力。最后,研制了一台逆变器原理样机,通过实验证明了理论分析的正确性。
- 关键字:
逆变器 解耦控制 脉宽调制 不平衡负载
解耦控制介绍
解耦控制(decoupling cONtrol)是一种多变量系统控制的有效手段。解耦控制是指通过解耦环节,使存在耦合的被控过程中的每个控制变量的变化只影响与其配对的被控参数,而不影响其他控制回路的被控参数的过程。 由相对增益和系统耦合关系可以将解耦控制系统分为以下4类: 1.相对增益均为0(或1)通道间无耦合,可以根据相对增益显示的输入输出配对实现系统无耦合控制; 2.相对增益数值均接近 [
查看详细 ]
关于我们 -
广告服务 -
企业会员服务 -
网站地图 -
联系我们 -
征稿 -
友情链接 -
手机EEPW
Copyright ©2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《电子产品世界》杂志社 版权所有 北京东晓国际技术信息咨询有限公司

京ICP备12027778号-2 北京市公安局备案:1101082052 京公网安备11010802012473