- 为验证角动量守恒定律,设计完成了单轮自平衡机器人的软硬件实现方案。基于角动量守恒定理,以STM32单片机为主控制器,通过MPU6050陀螺仪加速度传感器检测机器人姿态信息,利用PID算法计算出PWM驱动电机的占空比,进而驱动直流电机和无刷电机转动来保持机器人平衡。实验表明,本方案可以实现单轮自平衡机器人的自启动、站立及行进功能。
- 关键字:
202307 角动量守恒 STM32单片机 PID算法 MPU6050
- 本系统主要利用单片机Arduino Mega2560完成了水中管道巡检机器人设计,其中主要包括TAMEGA2560主控制单元、OpenMV机器视觉模块、三色LED小灯、L298N直流电机驱动模块以及水压传感器和姿态传感器。本系统主要通过OpenMV采集管道信息,通过姿态传感器和水压传感器识别船身姿态和深度信息,并传送给主控板,再通过PID算法控制电机,完成循迹功能和船身姿态控制;在将OpenMV识别信息传送给主控板,完成标志物识别以及报警功能。
- 关键字:
202201 ATMEGA2560 OpenMV视觉模块 L298N电机驱动模块 PID算法

- 本项目设计了一种以印刷铝基板为加热平台,STC12C5A60S2为单片机控制芯片,采用直流24 V电压供电,设计MOS管功率驱动电路,利用温度传感器获取到加热平台的温度,根据用户设定的加热模式及温度采用PID算法调节加热曲线,形成闭环控制,以达到加热平台恒温的目的。最后实验结果表明,所设计的整套系统,具有低成本,灵敏度高,适合发烧友玩家DIY的一款产品,具有较高的使用和推广价值。
- 关键字:
202204 加热台 铝基板 STC12C5A60S2 单片机 PID算法 功率管
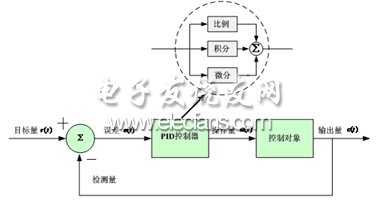
- 1.引言在许多现代化的工业生产如冶金、电力等,实现对温度的精度控制至关重要的,不仅直接影响着产品的质量,而且还关系到生产安全、能源节约等一系列重大经济指标。PID控制由于其鲁棒性好,可靠性高,在常规的温度
- 关键字:
FPGA PID算法
- 摘要:传统电热水器系统大多采用单片机作为控制核心,仅具有加热和保温功能,水温不可见,水量不易控制,大多热水器在保温时采用开关控制,给电力系统带来巨大冲击。本系统选用现场可编程逻辑器件Actel Fusion系列F
- 关键字:
智能 模数混合 FPGA 低功耗 PID算法
- 高速动车对安全要求越来越高,文章介绍一种电调制非分光红外传感器构成的新型气体测试仪中关键问题的分析与设计。测试仪中电调制非分光红外传感器采用电调制红外光源,同时采用高精度干涉滤光片以及镀金气室,通过PID算法实现高精度环境控温,设计选频特性优良、强抗干扰能力的微弱信号处理电路,最终完成SO2、CO、CO2等气体的测试系统。
- 关键字:
电调制红外光源 NDIR PID算法 微弱信号处理
- 摘要:针对生产生活中对温度控制的高精度要求,利用双单片机(SCM)作为硬件平台,融合无线传输技术、PWM波产生技术,采用PID算法,设计了一种基于双单片机的电烤箱温度控制系统。采用多点测温,提高温度控制精度;利用
- 关键字:
单片机 温度控制 PID算法 无线传输
- 摘要:稳定平台隔离载体运动的特性使其在军事及民用领域中得到了广泛的应用。然而由于负载特性与工况的不同以及系统技术实现复杂等原因使得稳定平台的通用性不高。本文基于某武器系统的需要,对机电式双轴实时稳定平
- 关键字:
TMS320F2812 实时自动调平 卡尔曼滤波 PID算法
- 系统通过高速直流电机带动风扇旋转产生风压,在管道内产生空气流动,构成简易风洞。设计了以MSP430F149单片机为核心的控制系统,该系统由MSP430单片机最小系统、超声波检测、电机驱动、液晶显示器以及键盘控制,语音播报模块构成;通过PID核心算法,输出可调占空比的PWM波,驱动小球的上下移动;并通过超声波位置检测模块,实时检测小球的高度。试验结果表明该控制系统具有响应速度快、控制精度高、抗干扰能力强等优点。
- 关键字:
MSP430F149 超声波 电机驱动 PID算法
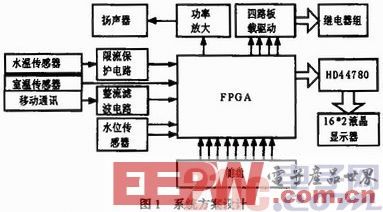
- 摘要:传统电热水器系统大多采用单片机作为控制核心,仅具有加热和保温功能,水温不可见,水量不易控制,大多热水器在保温时采用开关控制,给电力系统带来巨大冲击。本系统选用现场可编程逻辑器件Actel Fusion系列FPGA作为控制核心,充分利用其內部模数混合的特点实现水温数字可视化、可预约时间等等功能,运用PID算法实现水的加热和保溫,使电力系统受到很小的冲击,且该系统具有安全可靠、节能、高效能、性能稳定、简易操作的特性。
随着社会的进步与发展,家庭生活的标准也在不断提高,人们更加追求家庭生活的高度
- 关键字:
模数混合 FPGA 低功耗 PID算法
- 1引言当船舶在大海中航行时,通常利用自动舵系统改变舵角从而使船舶沿着期望的航迹自动航行[1]。自动舵系...
- 关键字:
PID算法 船舶航迹 自动控制
- 1年前就有听说 摇摇摆摆终于 可以来 详细的 应用学习下系统需求: 调压器 恒压恒流功能的使用 最基本的比例 ...
- 关键字:
PID算法 恒压系统 系统状态
- PID 计算资源需求DS=Pdu(k)+I t/ti( uk)+ D TD/T duk+du(k-1)puk-i *T/TI*uk+d*(uk-2* uk-1 + uk-2)三 ...
- 关键字:
PID算法 C18程序 采样时间
pid算法介绍
您好,目前还没有人创建词条pid算法!
欢迎您创建该词条,阐述对pid算法的理解,并与今后在此搜索pid算法的朋友们分享。
创建词条
关于我们 -
广告服务 -
企业会员服务 -
网站地图 -
联系我们 -
征稿 -
友情链接 -
手机EEPW
Copyright ©2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《电子产品世界》杂志社 版权所有 北京东晓国际技术信息咨询有限公司

京ICP备12027778号-2 北京市公安局备案:1101082052 京公网安备11010802012473