- 一款功率为200W太阳能光伏并网逆变器设计方案全过程,可将太阳能电池板产生的直流电直接转换为220V/50Hz的工频正弦交流电输出至电网。
一种小功率光伏并网逆变器的控制系统:DC/DC控制器的拓扑结构采用推挽式电路,是用芯片SG3525来控制的,该电路有效地防止了偏磁,DC/AC逆变器为全桥逆变电路,是用DSP来控制的,由于DSP的运算速度比较高,因此逆变器的输出电流能够很好地跟踪电网电压波形。该光伏并网逆变器控制方案的有效性在实验室得到验证。该控制系统能确保逆变电源的输出功率因数接近1,输出
- 关键字:
逆变器 DSP
- 随着电子产品的功能变得日益复杂,混合信号越来越多地出现在工程师设计的产品中。虽然混合信号可以给设计带来灵活性,但由于模拟和数字信号有着不同的频率和幅度特性,因而工程师调试和测试产品的难度也增大了。本文详细介绍了如何利用安捷伦的混合信号示波器来完成设计调试和测试。
如今,无论是在计算机领域,通信领域还是消费类电子领域,当你信手捻来一块电路板时,就会发现其中所使用的器件是多样性的,往往是混合着模拟器件和数字器件,其中模拟部分包括光、声音、温度、压力等现实世界物理信号,以及电源信号
- 关键字:
示波器 DSP
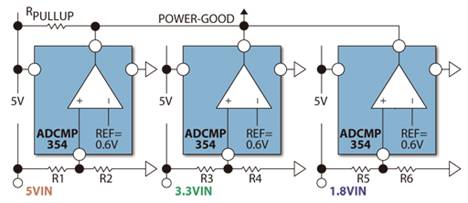
- 随着系统内电源数量的增多,为了确保其安全、经济、持续和正常的工作,对电源轨进行监测和控制变得非常重要,特别是在使用微处理器时。确定电压轨是否处于工作范围内,以及该电压相对于其它电压轨是否按照正确的时序上电或断电,这些对于系统执行的可靠性和安全性来说都是至关重要的。例如FPGA,在向组件提供5V I/O(输入/输出)电压之前,必须先施加3.3V的核心电压,并持续至少20ms,以避免组件上电时受到损坏。对于系统的可靠性来说,满足这样的时序要求就像要保证组件在规定的电源电压和温度范围内工作一样至关重要。
- 关键字:
FPGA DSP
- 全球领先的蜂窝通信、多媒体和连接性DSP IP平台授权厂商CEVA公司宣布专注开发独特太空应用抗辐射加固ASIC解决方案的无晶圆厂半导体提供商Ramon Chips公司已经获得CEVA-X1643的授权许可,用于其瞄准高性能太空计算的RC64 64核并行处理器。Ramon将在RC64处理器中集成64个CEVA-X1643 DSP,为用于通信、地球观测、科学和其它许多应用的新一代卫星实现计算能力的巨大飞跃。
RC64是65nm CMOS并行处理器,提供384 GOPS、38 GFLOPS和60 G
- 关键字:
CEVA DSP
- 陀螺仪是一种能够精确地确定运动物体方位的仪器,它是现代航空、航海、航天和国防工业中广泛使用的一种惯性导航仪器,它的发展对一个国家的工业,国防和其他高科技的发展具有十分重要的战略意义。
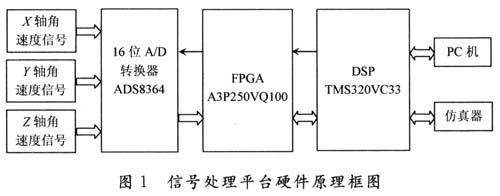
近年来随着MEMS(微机电系统)技术的发展,MEMS陀螺仪的研究与发展受到了广泛的重视。MEMS陀螺仪具有体积少、重量轻、可靠性好、易于系统集成等优点,应用范围广阔。但是目前MEMS陀螺仪的精度还不是很高,要想大范围应用必须对MEMS陀螺仪的信号进行处理。
本文选用TI公司的TMS320VC33作为MEMS陀
- 关键字:
DSP MEMS
- 陀螺仪是一种能够精确地确定运动物体方位的仪器,它是现代航空、航海、航天和国防工业中广泛使用的一种惯性导航仪器,它的发展对一个国家的工业,国防和其他高科技的发展具有十分重要的战略意义。
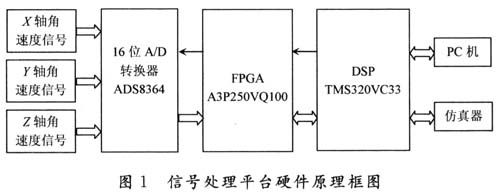
近年来随着MEMS(微机电系统)技术的发展,MEMS陀螺仪的研究与发展受到了广泛的重视。MEMS陀螺仪具有体积少、重量轻、可靠性好、易于系统集成等优点,应用范围广阔。但是目前MEMS陀螺仪的精度还不是很高,要想大范围应用必须对MEMS陀螺仪的信号进行处理。
本文选用TI公司的TMS320VC33作为MEMS陀
- 关键字:
DSP MEMS
- “伺服”—词源于希腊语“奴隶”的意思。人们想把“伺服机构”当个得心应手的驯服工具,服从控制信号的要求而动作。在讯号来到之前,转子静止不动;讯号来到之后,转子立即转动;当讯号消失,转子能即时自行停转。由于它的“伺服”性能,因此而得名——伺服系统。
基于VB的伺服驱动器串口通信的实现
本文即针对德国博世力士乐的伺服驱动器indradrive,采用灵活易用的VB6.
- 关键字:
MATLAB 振荡器
- “伺服”—词源于希腊语“奴隶”的意思。人们想把“伺服机构”当个得心应手的驯服工具,服从控制信号的要求而动作。在讯号来到之前,转子静止不动;讯号来到之后,转子立即转动;当讯号消失,转子能即时自行停转。由于它的“伺服”性能,因此而得名——伺服系统。
基于VB的伺服驱动器串口通信的实现
本文即针对德国博世力士乐的伺服驱动器indradrive,采用灵活易用的VB6.
- 关键字:
MATLAB PID
- 0 引 言
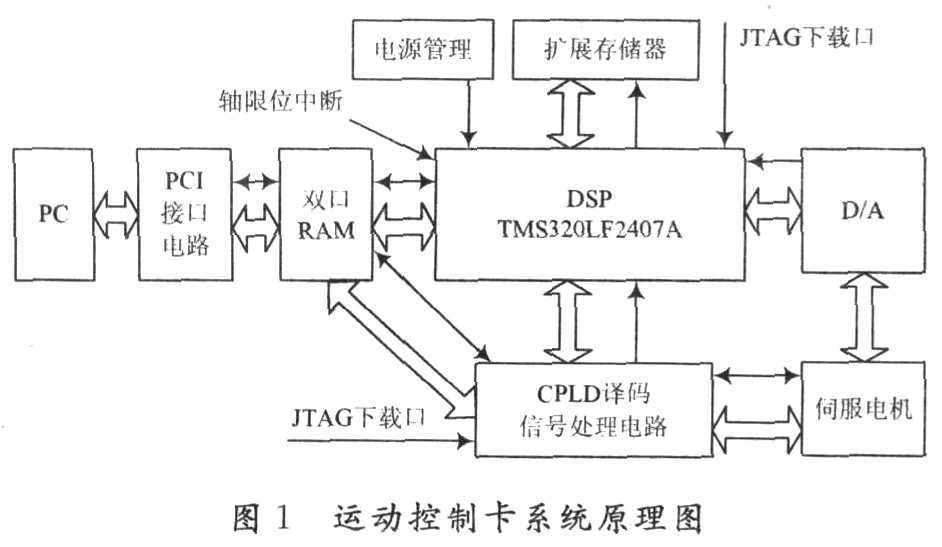
随着先进制造技术的迅速发展,对运动控制的精度要求也越来越高,而运动伺服控制系统的性能很大程度上取决于伺服控制算法,通过运动控制与智能控制的融合,从改进传统的PID控制,到现代的最优控制、自适应控制、智能控制技术,应用先进的智能控制策略达到高质量的运动控制效果,已经成为当前研究的一个热点。
由于运动伺服控制系统中存在负载模型参数的变化,机械摩擦、电机饱和等非线性因素,造成受控对象的非线性和模型不确定性,使得需要依靠精确的数学模型,系统模型参数的常规PID控制很难获得超高精度、快响
- 关键字:
DSP CPLD
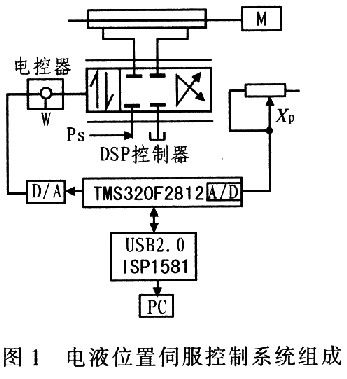
- 在汽车制造过程中,大量应用电液位置伺服式机械手(焊装、喷漆)、机床(冲、压)以及其他加工装置。电液位置伺服系统具有功率大、响应快、精度高的特点,这就要求控制系统不仅有良好的定位精度,而且要有好的伺服跟踪性能,因此是控制领域中的一个重要组成部分。电液位置伺服控制系统的典型特征是非线性、不确定性、时变性、外界干扰和交叉耦合干扰等,系统精确的数学模型不易建立。因此,对电液系统的控制一直是一个复杂控制系统问题。
常规PID控制器具有结
- 关键字:
DSP NNC-PID
- GPU是显示卡的“心脏”,也就相当于CPU在电脑中的作用,它决定了该显卡的档次和大部分性能,同时也是2D显示卡和3D显示卡的区别依据。2D显示芯片在处理3D图像和特效时主要依赖CPU的处理能力,称为“软加速”。3D显示芯片是将三维图像和特效处理功能集中在显示芯片内,也即所谓的“硬件加速”功能。显示芯片通常是显示卡上最大的芯片(也是引脚最多的)。GPU使显卡减少了对CPU的依赖,并进行部分原本CPU的工作,尤其是在3D图形处理时。G
- 关键字:
CPU DSP
- 对FPGA技术来说,早期研发在5年前就已开始尝试采用多核和硬件协处理加速技术朝系统并行化方向发展。在实际设计中,FPGA已经成为CPU的硬件协加速器,很多芯片厂商采用了硬核或软核CPU+FPGA的模式,今后这一趋势也将继续下去。
CPU+FPGA模式的兴起
赛灵思根据市场需求,率先于2010年4月28日发布了集成ARM Cortex-A9CPU和28nmFPGA的可扩展式处理平台(Extensible Processing Platform)架构。
该公司全球市场营销及业务开发高级副
- 关键字:
FPGA DSP
- 在室内环境无法使用卫星定位时,使用室内定位技术作为卫星定位的辅助定位,解决卫星信号到达地面时较弱、不能穿透建筑物的问题。最终定位物体当前所处的位置。本文为您介绍几种室内定位及导航的具体方案,仅供参考。
基于DSP的室内惯性导航系统设计
本文将选用低成本的MEMS器件,结合DSP和卡尔曼滤波算法,能实现较高精度的轮式小车导航和定位。
基于RFID的二维室内定位算法的实现
本文提出另一种方法,在二维平面上只需使用4个参考标签及2个远距RFID读取器,即可实现二维室内定位,大大降低了
- 关键字:
DSP MEMS
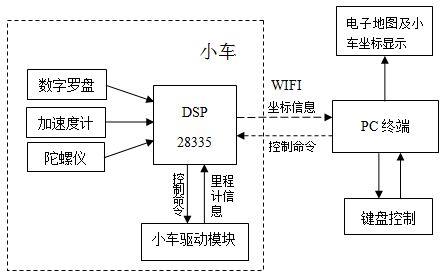
- 轮式遥控机器人已经应用在地震、火灾等一些危险的室内区域进行救援和探测,或执行反恐任务。由于在这些特殊的环境下存在诸多的未知因素,且室内无GPS信号,人们不得不依靠先进的科学技术和仪器来获取遥控机器人小车的导航信息。但是目前轮式运动小车主要采用的导航传感方式有视觉、光电、超声、里程计等,比较容易被外界环境干扰,不能满足广大市场的需求。
但是惯性导航装备安置在运载体内,工作时不依赖外界信息,也不向外界辐射能量,不容易遭到滋扰,是一种自立式导航系统,优于上述的导航传感例子。并且近年来MEMS(微机电系
- 关键字:
DSP JTAG
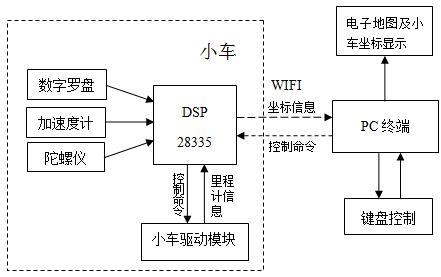
- 轮式遥控机器人已经应用在地震、火灾等一些危险的室内区域进行救援和探测,或执行反恐任务。由于在这些特殊的环境下存在诸多的未知因素,且室内无GPS信号,人们不得不依靠先进的科学技术和仪器来获取遥控机器人小车的导航信息。但是目前轮式运动小车主要采用的导航传感方式有视觉、光电、超声、里程计等,比较容易被外界环境干扰,不能满足广大市场的需求。
但是惯性导航装备安置在运载体内,工作时不依赖外界信息,也不向外界辐射能量,不容易遭到滋扰,是一种自立式导航系统,优于上述的导航传感例子。并且近年来MEMS(微机电系
- 关键字:
DSP HMC5883L
matlab-dsp介绍
您好,目前还没有人创建词条matlab-dsp!
欢迎您创建该词条,阐述对matlab-dsp的理解,并与今后在此搜索matlab-dsp的朋友们分享。
创建词条
关于我们 -
广告服务 -
企业会员服务 -
网站地图 -
联系我们 -
征稿 -
友情链接 -
手机EEPW
Copyright ©2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《电子产品世界》杂志社 版权所有 北京东晓国际技术信息咨询有限公司

京ICP备12027778号-2 北京市公安局备案:1101082052 京公网安备11010802012473