- 前言:
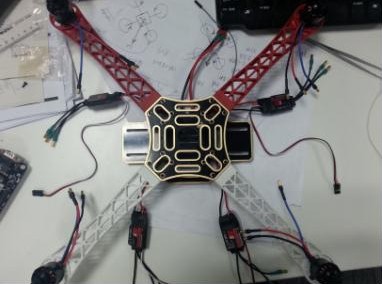
相比直升机来说,四旋翼乃至多旋翼飞行器的机械结构简单,操控灵活,飞行稳定,体积也能做的更小,当然也能更大,它将直升机复杂的机械结构设计难度转化到了电子电路和算法上面,因此四旋翼飞行器的设计更容易上手,更民众化。
四旋翼飞行器的软件核心包括两大部分:姿态融合算法和控制算法;硬件核心便是MCU和传感器。
先介绍下姿态融合算法,姿态融合说白了就是将3轴加速度、3轴角速度和3轴磁场强度融合成四元数,再将四元数转化为欧拉角,最后将欧拉角最为控制量输送到所有电机以达控制飞行器姿态的目的。
- 关键字:
GD32F103 MPU9150
mpu9150介绍
您好,目前还没有人创建词条mpu9150!
欢迎您创建该词条,阐述对mpu9150的理解,并与今后在此搜索mpu9150的朋友们分享。
创建词条
关于我们 -
广告服务 -
企业会员服务 -
网站地图 -
联系我们 -
征稿 -
友情链接 -
手机EEPW
Copyright ©2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《电子产品世界》杂志社 版权所有 北京东晓国际技术信息咨询有限公司

京ICP备12027778号-2 北京市公安局备案:1101082052 京公网安备11010802012473