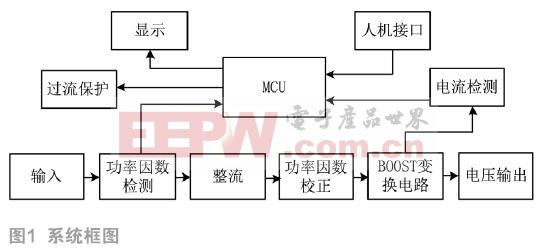
- 基于有源功率因数校准技术,设计了一款高功率因数开关电源实验平台,平台具有自动功率因数校正,结构简单,保护措施完善等优势。平台整体系统设计以德州仪器公司的APFC芯片UCC28019为核心器件,采用电流内环加电压外环的双闭环控制,保证了系统功率因数不低于0.95,采用电流电压互感器采集信号相位,测量并实现功率因数实时显示,同时也可对异常输出进行继电保护。电源系统采用BOOST升压电路,在输出36V/2A额定条件下效率不低于95%,采用良好的闭环反馈电路补偿机制,电压调整率和负载调整率均不高于0.5%。控制核
- 关键字:
功率因数校正 UCC28019 BOOST MC9S12XS128 20170203
- 1 引言
智能小车寻迹系统是基于摄像头和飞思卡尔16微处理器mc9s12xs128组成,由摄像头采集图像有用信息送入单片机分析道路参数。
智能小车跑道表面为白色,中心有连续黑线作为引导线,黑线宽25mm,铺设跑道地板颜色与背景不一样;跑道宽度为60cm,窄道区的宽度为45cm;跑道最小曲率半径不小于50 厘米; 跑道可以交叉,交叉角为90度。
系统主要包括视频图像采集、图像处理、黑线中心提取、路径判断。
2 视频图像采集
图像采集是基于mc9s12xs128单片机来实现的。mc9s12xs128
- 关键字:
飞思卡尔 mc9s12xs128
- 1 引言
智能小车寻迹系统是基于摄像头和飞思卡尔16微处理器mc9s12xs128组成,由摄像头采集图像有用信息送入单片机分析道路参数。
智能小车跑道表面为白色,中心有连续黑线作为引导线,黑线宽25mm,铺设跑道地板颜色与背景不一样;跑道宽度为60cm,窄道区的宽度为45cm;跑道最小曲率半径不小于50 厘米; 跑道可以交叉,交叉角为90度。
系统主要包括视频图像采集、图像处理、黑线中心提取、路径判断。
2 视频图像采集
图像采集是基于mc9s12xs128单片机来实现的。mc9s12xs128
- 关键字:
飞思卡尔 mc9s12xs128
- 1 引言
智能小车寻迹系统是基于摄像头和飞思卡尔16微处理器mc9s12xs128组成,由摄像头采集图像有用信息送入单片机分析道路参数。
智能小车跑道表面为白色,中心有连续黑线作为引导线,黑线宽25mm,铺设跑道地板颜色与背景不一样;跑道宽度为60cm,窄道区的宽度为45cm;跑道最小曲率半径不小于50 厘米; 跑道可以交叉,交叉角为90度。
系统主要包括视频图像采集、图像处理、黑线中心提取、路径判断。
2 视频图像采集
图像采集是基于mc9s12xs128单片机来实现的。mc9s12xs128
- 关键字:
飞思卡尔16 mc9s12xs128
- 引言 由于石油危机和日益严重的环境污染,电动汽车发展已经是大势所趋。蓄电池为电动汽车提供动力,而蓄电池充电性能直接影响蓄电池的使用和寿命,蓄电池一般分为铅蓄电池、镍镉电池、镍氢电池和锂离子电池。由于
- 关键字:
充电 系统 设计 多功能 蓄电池 MC9S12XS128 各类 基于
- 摘要:针对“飞思卡尔”杯全国大学生智能车邀请赛,设计了基于MC9S12XS128(飞思卡尔专用芯片)的单片机开发系统,在此给出主要硬件电路和软件设计流程。为验证该系统可靠性,设计了4times;4矩阵键盘键号的
- 关键字:
设计 开发 单片机 MC9S12XS128 基于
mc9s12xs128介绍
您好,目前还没有人创建词条mc9s12xs128!
欢迎您创建该词条,阐述对mc9s12xs128的理解,并与今后在此搜索mc9s12xs128的朋友们分享。
创建词条
关于我们 -
广告服务 -
企业会员服务 -
网站地图 -
联系我们 -
征稿 -
友情链接 -
手机EEPW
Copyright ©2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《电子产品世界》杂志社 版权所有 北京东晓国际技术信息咨询有限公司

京ICP备12027778号-2 北京市公安局备案:1101082052 京公网安备11010802012473