- 基于ARM 的浆果采摘机械手运动控制研究, 随着计算机和自动控制技术的迅速发展,农业机械将进入高度自动化和智能化时期。浆果采摘机器人的应用可以提高劳动生产率和产品质量,改善劳动条件,解决劳动力不足等问题。浆果采摘机器人主要由机械手及末端执行器
- 关键字:
控制 研究 运动 机械手 ARM 采摘 基于 ARM
- 基于现场总线的开放结构机械手控制系统是目前机械手控制的发展方向。文章通过对物料搬运机械手装置及其控制系统的介绍,提出了基于CAN总线的机械手控制系统方案,分析了控制系统的结构组成,并对在Windows98平台上用VC++6.0开发CAN总线控制系统软件进行了较为详细的论述。
- 关键字:
控制系统 机械手 总线 CAN 基于 CAN
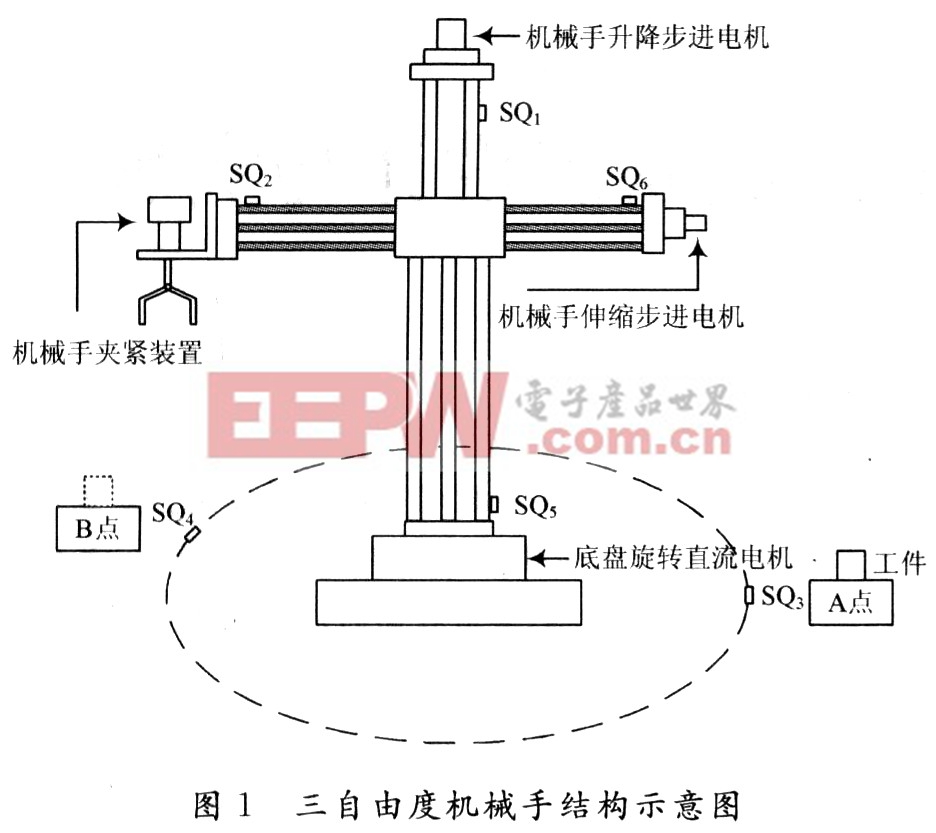
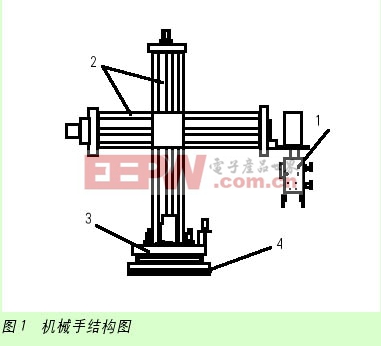
- 摘要:为了提高机械手在工业生产中定位的精度,介绍一种基于PLC的三自由度机械手控制系统设计方案。方案中提出了步进电机在机械手定位应用中的一种新思路,详细论述三自由度机械手控制系统的硬件结构及软件实现方法,
- 关键字:
设计 实现 控制系统 机械手 PLC 自由度 基于
- 随着社会生产不断进步和人们生活节奏不断加快,人们对生产效率也不断提出新要求。由于微电子技术和计算软、硬件技术的迅猛发展和现代控制理论的不断完善,使机械手技术快速发展,其中气动机械手系统由于其介质来源简
- 关键字:
设计 控制 机械手 PLC 基于
- 电子产品世界,为电子工程师提供全面的电子产品信息和行业解决方案,是电子工程师的技术中心和交流中心,是电子产品的市场中心,EEPW 20年的品牌历史,是电子工程师的网络家园
- 关键字:
机械手 RFID 零件管理
- 摘要:针对平面关节型机械手各关节联动的特点,研制和开发了基于PIC16F877单片机和运动芯片LM629的底层控制系统。采用LM629这样的集成运动芯片,简化整个控制系统的硬件电路结构,提高系统的可靠性和控制精度。
关键词:机械手 PIC单片机 LM629 L298N 控制器
引 言
平面关节型机械手是应用最广泛的机械手类型之一,既可以用于实际生产,又可以用于教学实验和科学研究。用于实际生产,它能够满足装配作业内容改变频繁的要求;用于教学实验,它能够使人直观地了解机器人结构组成、动作原理
- 关键字:
机械手 PIC单片机 LM629 L298N 控制器 MCU和嵌入式微处理器
- 本文以远程控制作业机械手的实例,介绍了远程串行通信的基本架构及实现过程,分析了直接控制机89C51硬件及其软件的设计与实现。
- 关键字:
设计 实现 机械手 制作业 远程 网络
机械手介绍
您好,目前还没有人创建词条机械手!
欢迎您创建该词条,阐述对机械手的理解,并与今后在此搜索机械手的朋友们分享。
创建词条
关于我们 -
广告服务 -
企业会员服务 -
网站地图 -
联系我们 -
征稿 -
友情链接 -
手机EEPW
Copyright ©2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《电子产品世界》杂志社 版权所有 北京东晓国际技术信息咨询有限公司

京ICP备12027778号-2 北京市公安局备案:1101082052 京公网安备11010802012473