ADC驱动器或差分放大器设计指南

 | (3, 4) |
需要注意实际的输出共模电压VOUT, cm和VOCM输入端之间的差异,这个差异决定了输出共模电平。
对差分ADC驱动器的分析比对传统运放的分析要复杂得多。为了简化代数表达式,暂且定义两个反馈系数β1和β2,见公式5和公式6。
 | (5, 6) |
在大多数ADC驱动应用中β1= β2,但含有VIP、VIN、VOCM、β1和β2项的VOUT, dm通用闭环公式对于了解β失配对性能的影响非常有用。VOUT, dm的计算见公式7,其中包括了与频率相关的放大器有限开环电压增益A(s)。
 | (7) |
当β1 ≠β2时,差分输出电压取决于VOCM——这不是理想的结果,因为它产生了偏移,并且在差分输出中有过大的噪声。电压反馈架构的增益带宽积是常数。有趣的是,增益带宽积中的增益是两个反馈系数平均值的倒数。当β1 =β2 ≡β时,公式7可以被简化为公式8。
|
这个表达式大家可能更加熟悉。当A(s) → ∞时,理想的闭环增益可以简化为RF/RG。增益带宽乘积公式看起来也很熟悉,其中的“噪声增益”与传统运放一样,等于1/β。
 | (9) |
输出平衡是差分ADC驱动器的一个重要性能指标,它分两个方面:幅度平衡和相位平衡。幅度平衡用于衡量两个输出在幅度方面的接近程度,对于理想放大器来说它们是完全一致的。输出相位平衡用于衡量两个输出的相位差与180°的接近程度。输出幅度或相位的任何失衡都会在输出信号中产生有害的共模分量。输出平衡误差(公式10)是差分输入信号产生的输出共模电压与相同输入信号产生的输出差模电压的对数比值,单位是dB。
 | (10) |
内部共模反馈环路迫使VOUT, cm等于输入端VOCM的电压,从而达到完美的输出平衡。
将输入端接到ADC驱动器
处理高速信号的系统经常会用到ADC驱动器。分隔距离超过信号波长一小段的器件之间必须用具有受控阻抗的电气传输线连接,以避免破坏信号完整性。当传输线的两端用其特征阻抗端接时可以取得最佳性能。驱动器一般放在靠近ADC的地方,因此在它们之间不要求使用受控阻抗连接。但到ADC驱动器输入端的引入信号连接通常很长,必须采用正确电阻端接的受控阻抗连接。
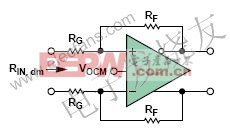
不管是差分还是单端,ADC驱动器的输入阻抗必须大于或等于理想的终端电阻值,以便添加的终端电阻RT能与放大器输入端并联达到要求的电阻值。本文讨论的例子中的所有ADC驱动器都设计成具有平衡的反馈比,如图2所示。











评论