中科大便携式柔性康复手套机器人登Nature子刊!可实现手部精细动作康复

手功能障碍患者的福音来了!
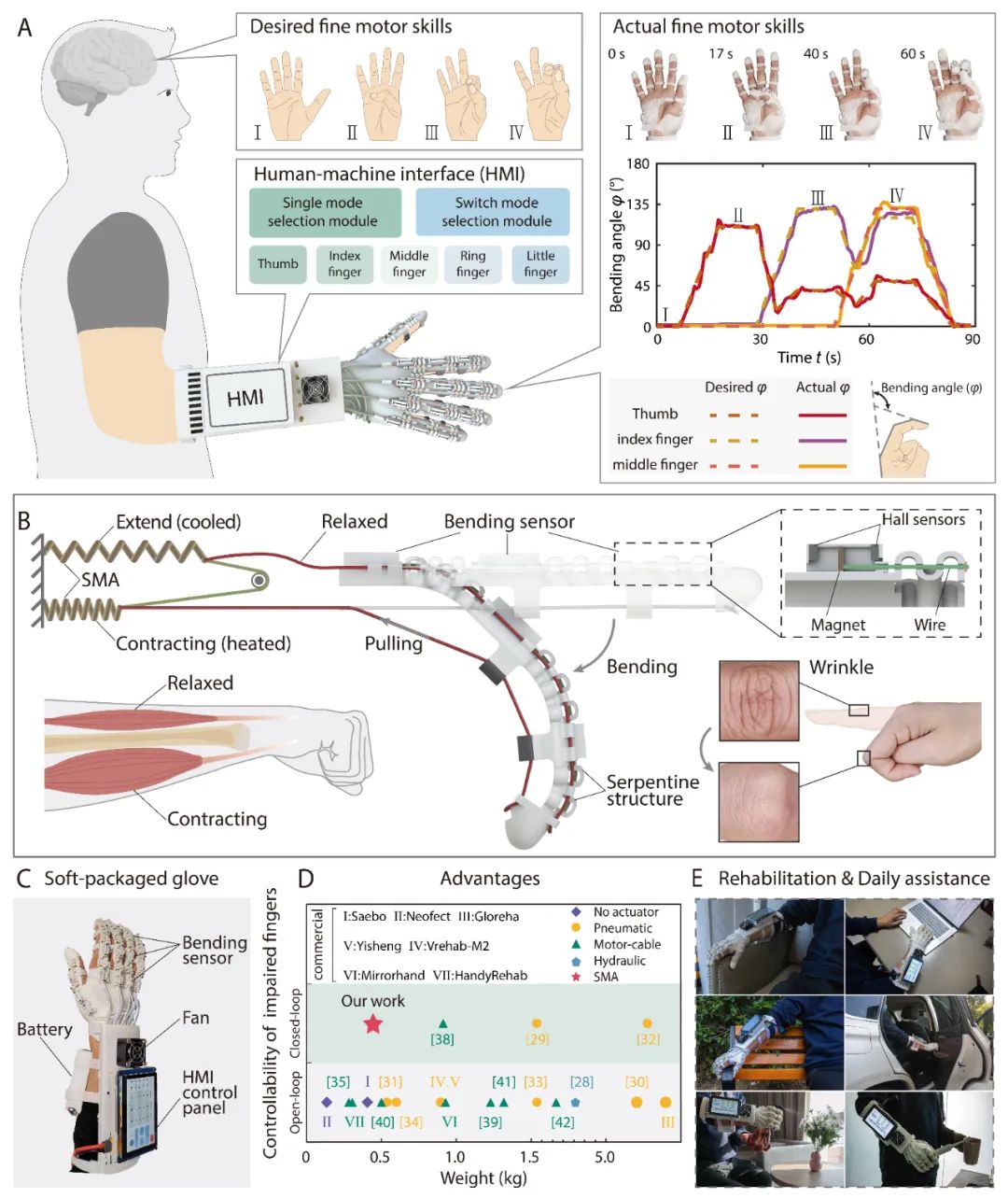
中国科学技术大学张世武教授、金虎副教授和王柳特任教授基于手指皮肤非均匀形变机制和手部精细动作康复运动机理,研制了一种具备精细动作训练的低成本便携式柔性康复手套机器人,系统仅重490克,有望服务全球数千万手功能障碍患者的精细动作康复与日常生活辅助。
10月5日,相关成果以研究长文在线发表于国际学术期刊《自然·机器智能》(Nature Machine Intelligence)。
柔性康复手套机器人
研究人员综合手指皮肤褶皱结构的仿生原理和霍尔传感机制,创新性设计了集柔顺运动与精确感知一体的仿生指套结构,并据此开发了融合传感系统、形状记忆合金(SMA)驱动与智能控制系统、供能与热控系统和人机交互系统的柔性康复手套。
该机器人的驱动系统采用了类肌肉-肌腱的仿生结构设计,同时设计了用于SMA冷却的可控风道系统,提高了SMA指套的驱动频率,使得SMA驱动的位移、力和驱动频率适用于手功能康复需求。
此外,通过模仿手指背部褶皱皮肤,提出了一种非均匀刚度柔性指套的仿生设计方法,并设计了基于霍尔传感元件的关节传感系统,通过与柔性指套的非均匀刚度结构适配,大大降低了指套运动对传感系统的干扰,实现稳定、精确的手指状态感知。
采用闭环反馈控制算法,获取SMA指套的精确运动控制和精细动作运动,从而实现了患者手指精细运动的多模式康复训练。
▍视频1:柔性康复手套机器人期望动作验证
研究人员首先在健康志愿者手上测试康复手套机器人的性能,并通过肌电信号表明志愿者零用力,确保测试实验的可靠性。结果显示,柔性康复手套机器人能够精确控制手指完成期望动作(视频1)。
▍视频2:柔性康复手套机器人临床测试
柔性康复手套机器人临床精细动作测试(圆柱握、侧捏、握拳)
人手可以通过执行单一动作或其组合实现复杂操作。生活中90%的手部日常精细动作来源于拇指对指、指尖对指、三指捏、圆柱握、侧捏、握拳等六种单一动作及其组合。
恢复手部运动功能障碍患者的精细运动能力是康复的最终目的,研究人员在脑卒中患者手上进行柔性康复手套机器人临床实验,通过无佩戴手套与佩戴手套的动作对比,验证康复手套机器人可辅助手功能障碍患者实现手部精细动作输出,开展精细动作技能康复(视频2)。
▍视频3:柔性康复手套机器人日常生活辅助
喝水
柔性康复手套机器人的轻质与高集成设计使其具有极高的便携性,使得患者的手功能康复训练脱离医院等固定康复场所,实现了如家庭、公园、办公室等场景的康复训练。
由于SMA驱动不会像流体驱动、电机驱动等产生噪音,研究人员也验证了其在低噪声环境的使用可行性,如图书馆等。此外,临床实验表明患者通过人机交互界面输入期望动作,柔性康复手套机器人能够辅助患者完成如梳头、刷牙、拆吃零食、喝药、写字等复杂任务;通过将患者的康复训练与日常生活需求相结合,实现精细动作技能康复与辅助患者生活的融合,极大拓展和提升了柔性康复手套机器人的应用场景和康复效果。(视频3)。
工程科学学院精密机械与精密仪器系博士生随梦理、欧阳一鸣,金虎副教授为论文第一作者。工程科学学院金虎副教授、王柳特任教授和张世武教授为论文通讯作者。论文的合作者还包括中国科学技术大学许旻副教授,澳大利亚伍伦贡大学李卫华教授等。该项研究工作得到了国家自然科学基金、安徽省重点研发计划、安徽省自然科学基金及中央高校基本科研业务专项资金的支持。
近年来,中国科大工程学院机器人与智能装备研究所团队在形状记忆合金(SMA)驱动器的精确控制方面开展深入研究,取得了系列进展,为康复手套机器人的精细运动控制奠定了良好基础。
团队首先针对基于SMA弹簧的柔性臂模块进行运动学建模,结合霍尔传感和PID方法,实现了SMA柔性臂模块的阶梯弯曲运动以及空间三维精确位置控制(视频4)。成果发表在IEEE Transactions on Industrial Electronics。接着,团队通过SMA本构方程的线性简化建模及模型反馈控制,实现了更加轻便的SMA薄片驱动器的位置和速度控制,突破了SMA软体机器人应用瓶颈(视频5)。成果分别发表在IEEE/ASME Transactions on Mechatronics和2021 IEEE International Conference on Robotics and Biomimetics (Finalist of Best Student Paper Award)。
▍视频4:SMA软体臂空间运动位置控制
▍视频5:SMA薄板驱动器负载下精确速度控制
来源:机器人大讲堂
*博客内容为网友个人发布,仅代表博主个人观点,如有侵权请联系工作人员删除。
