经济高效的矢量控制驱动(上)
要把电流分解为生成磁通的部分和生成扭矩的部分(isd、isq),我们需要知道电机磁通的位置。这需要与转子连接的速度或位置传感器传感准确的速度信息。增量编码器或解析器被作为矢量控制驱动的位置传导器使用。在成本敏感的应用中(如洗衣机),测速发电机被广泛采用。然而在有些应用中,并不需要使用速度/位置传感器。目的并不是直接测量速度/位置,而是采用某些间接方法,估算转子位置。那些没有采用速度传感器的算法被称为“无传感器控制”。
本文引用地址:http://www.eepw.com.cn/article/93432.htm矢量控制算法描述
已实施的控制算法的概述框图请见图3。与其他面向矢量控制的方法一样,它能够分别控制感应电机的励磁和扭矩。控制的目的是为了调节电机速度,速度命令值由高级控制进行设置。该算法在两条控制回路中实施,快速内部控制回路实施采用125 μs周期,慢速外部控制回路的实施采用1毫秒周期。
为了实现感应电机控制,该算法使用一组馈入信号。基本馈入信号是DC总线电压、三相定子电流,它们是从DC总线电流和电机速度重构而来。为了实现正确操作,控制结构要求电机轴上有速度传感器。在提供算法的情况下,使用增量编码器。
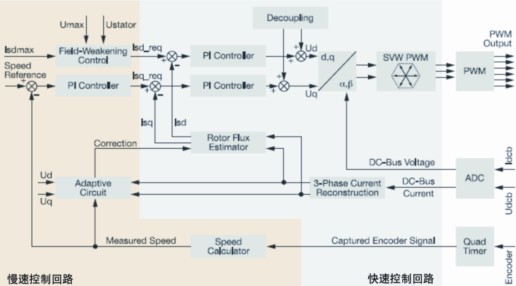
图3 控制算法框图
快速控制回路实施两个独立电流控制回路,它们是直轴和正交轴电流(isd、isq)PI控制器。直轴电流(isd)用于控制转子磁通,正交轴电流(isq)对应电机扭矩。电流PI控制器的输出用去藕定子电压的相应d和q轴部分进行汇总,这样我们就获得了应用于电机的定子电压的理想空间矢量。快速控制回路执行所有必要任务,支持定子电流部分的独立控制。这些功能模块包括:
- 三相电流重构;
- 前向Clark转换;
- 前向和后向Park转换;
- 转子磁化通量位置估算;
- DC总线电压波动消除;
- 空间矢量调制(SVM)。
慢速控制回路执行速度和磁场弱化控制器和低优先级控制任务。PI速度控制器输出为生成定子电流的正交轴分量(isq)的扭矩设置参考。生成定子电流的直轴分量(isd)的磁通参考由磁场弱化控制器设置。自适应电路纠正转子时间常量,最大限度地减少转子磁通位置估算的错误。










评论