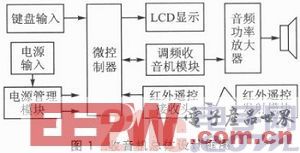
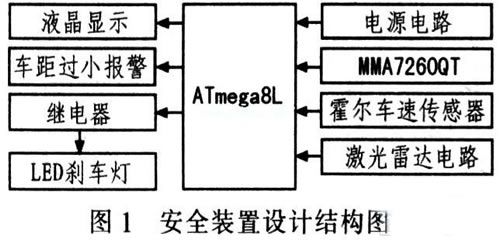
基于ATmega8L的新型防汽车追尾安全装置设计
2.3 霍尔车速传感器
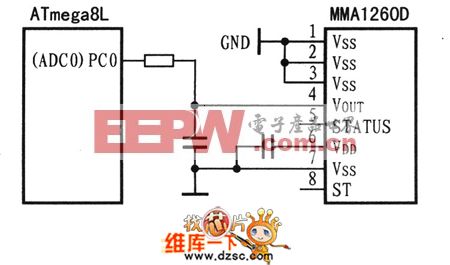
本文引用地址:http://www.eepw.com.cn/article/268652.htm霍尔车速传感器由8级磁钢、UGN-3030T型霍尔开关传感器、LM2917及放大电路组成,如图4所示。
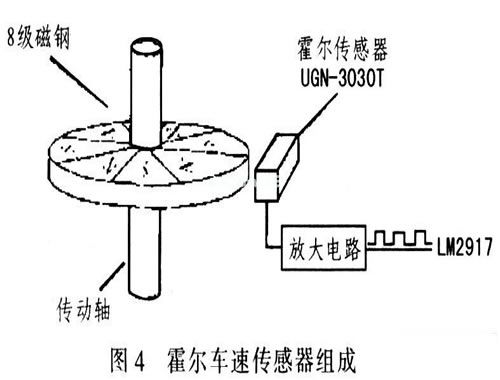
图4中,汽车传动部分带动8级磁钢旋转,由于磁场变化使得8级磁钢每转一圈霍尔传感器便产生8个脉冲信号,经放大器处理输出到频率/电压转换器LM2917,由单片机的A/D转换器根据LM2917输出电压测量当前汽车时速。
2.4 激光雷达测距
测距方法主要有超声波、激光雷达、连续波雷达等,基于成本和设计需求考虑,激光雷达测距是最佳选择。激光雷达测距有连续波和脉冲波两种方式,本设计使用脉冲波方式。安全装置发出脉冲状的红外激光束照射前方,并利用汽车后部可反光部件(以汽车号码牌为主)的反射光,通过受光装置检测反射光,单片机根据时间差计算出其距离。
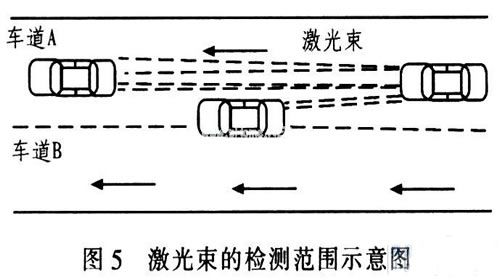
该部分电路由发光部、受光部、信号调理电路等组成,最终输出信号由系统单片机处理。由于激光雷达发射光束集中,采用单一发射方式无法有效检测前方一定距离,故在汽车前方安装3个激光雷达测距模块,如果其中一个模块检测到的距离小于该时刻最小允许距离,安全装置将报警,即能够及时检测到插入车流的车辆并警报,如图5所示。

低通滤波器相关文章:低通滤波器原理


评论