新型光学触摸屏的实现
⑵ 存在假两点现象[8],即该触摸屏不支持两点及多点触摸。只有两个摄像头时,触摸点为两点时会产生两个鬼点,系统无法分辨出真正的触摸点,如图3所示。进一步推断可知,若使触摸屏能支持N点触摸,触摸板上摄像头的数量至少为N+1。

1.2 本文触摸屏方案框架
为克服上述市售触摸屏的缺陷,设计了如图4所示的光学触摸屏架构。为支持两点触摸,同时避免触摸死角及鬼点的出现并增加数据冗余,在触摸板的四个角均对称安装了CMOS摄像头模块,触摸区域的四个边框安装了反光条。每个摄像头模块绑一个红外线LED灯用来照射反光条,摄像头模块用来采集反光条区域的图像。当触摸区域无触摸物时四个摄像头模块看到的都是全白的图像,当有触摸物放入时四个摄像头采集到的图像中均有一块黑色,根据四个摄像头采集到的黑色区域的位置分布可计算出触摸位置。采集芯片对四个摄像头模块采集到的数据做简单处理后将分析结果传至主控芯片,主控芯片分析四路数据并计算触摸点的物理坐标。但由于该方案相对于市售光学触摸屏增加了摄像头模块,因而会带来成本的增加,这是本方案的不足之处。
2 方案所用摄像头的内参数的求取
2.1 成像几何模型及摄像头参数简介
要分析图像产生的过程,首先要了解成像几何模型,这里以图5所示的小孔透视成像几何模型[6]为例简要介绍之。
该模型中O-XcYcZc为摄像头坐标系,O点与镜头的光心重合,Zc轴与镜头的光轴重合。O1-xy为图像所在的物理坐标系,x轴、y轴分别与Xc轴、Yc轴平行,O1在镜头光轴上。Oo -uv为像素坐标系,主点坐标为(uo,vo),Ow-XwYwZw为世界坐标系。三维世界坐标系中P(Xw,Yw,Zw)在摄像头坐标系中的坐标为(Xc,Yc,Zc),其成像点为p(u,v)。设单个像素点在u轴和v轴上的尺寸分别为dx和dy,镜头焦距为f,令fu=f/dx,fv=f/dy ,则有如下变换关系为成立:
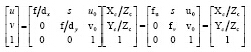 (2-1)
(2-1)
其中s称为u轴和v轴的不垂直因子,当u轴和v轴垂直时s=0。世界坐标系与摄像头坐标系的坐标变换关系[10]可以表示为:

其中R、T分别表示两个坐标系之间的旋转变换和平移变换。由(2-1)和(2-2)可得:
 (2-3)
(2-3)
其中u0、v0为光学中心,即镜头光轴与图像平面的焦点在像素坐标系中的坐标[5]。s为u轴和v轴的不垂直因子,fu、fv为u轴和v轴的尺度因子,称为归一化焦距。R和T分别为摄像头坐标系到世界坐标系的3×3单位正交旋转矩阵和3×1平移矩阵[7]。M1只与摄像头自身的参数相关,称为内参数矩阵[7],M2只与摄像头位置相关,称外参数矩阵[11],M称为摄像头的透视变换矩阵。当摄像头的空间位置发生变化时,内参数矩阵不会变化,但外参数矩阵会改变。
2. 2 求取方案所用摄像头内参数的实验装置介绍
为求取摄像头内参数,设计了如图6所示的实验装置。

波段开关相关文章:波段开关原理
摄像头相关文章:摄像头原理









评论