精度位置控制应用中运用NanoPWM驱动器代替线性驱动器
静止误差—NanoPWMvs线性驱动器
测试结果在表6中,总结在表格3中

表6 –NanoPWM(红色)VS线性驱动器(黄色)静止抖动
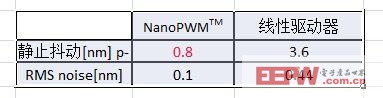
Table 3 - NanoPWM (红色) VS 线性驱动器 (黄色) 静止抖动
使用NanoPWM驱动器比使用线性驱动器时的静止抖动明显减小(小4.5倍:0.8nmVr3.6nm)
低速跟随误差-NanoPWM VS线性驱动器.
跟随误差是在1mm/s的速度下测量的,测试结果在表图7中,总结在表格4中

图7 NanoPWM驱动器(红色)VS线性驱动器(黄色)的跟随误差
NanoPWM 线性驱动器

Table 4 - NanoPWM (红) VS线性驱动器 (黄) 跟随误差
使用NanoPWM驱动器时跟随误差明显减小,结果得到跟平滑的运动轨迹,这样的轨迹在晶圆检测过程中十分重要。
静止误差-NanoPWM VS标准PWM驱动器
测试结果见图8,表5进行了总结

图8-NanoPWM(红色)vs PWM(黄色)静止抖动
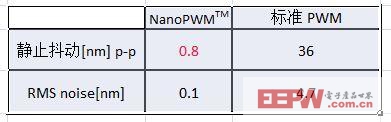
Table 5 - NanoPWM (红色) VS PWM drive (黄色) 静止抖动
使用NanoPWM驱动器的静止误差比使用标准PWM驱动器小两个数量级。平板显示器加工系统比较庞大,对于马达电压和电流的要求超过了目前商业化了的线性马达的容许能力。有机LED显示要求更高的精确度,跟随精度和静止抖动,都要在几个纳米的误差范围内。NanoPWM给这样的需求提出了解决方案。
总结
本文介绍了一直新型的线性开关伺服驱动器-NanoPWM,这种驱动器具有线性驱动器和PWM驱动器的所有优点。使用NanoPWM驱动器得到的运动性能超过了目前已经商业化了的线性伺服驱动器的性能。这种驱动器更小,更可靠,更便宜。
这种驱动器可以满足更高的运动性能需求,适合半导体晶圆检测和平板显示器制造系统。

pwm相关文章:pwm原理




评论