精度位置控制应用中运用NanoPWM驱动器代替线性驱动器
需求

表3-半导体晶圆蓝图
半导体晶圆检测系统要求亚纳米级的静止误差和纳米级跟随误差。今天,大多数系统是为了处理直径300mm 的晶圆。下一代晶圆的直径将达到450mm。这要求有同样或者更好的位置控制性能,由于尺寸和重量更大,我们需要更大的马达和驱动器来保持和提高系统的吞吐量。这样的系统要求驱动器具有线性驱动器和PWM驱动的优点。NanoPWMTM就是这样的驱动器。它很高效,可以实现高电压操作,提供高电流。它很紧凑而且成本更低。
图4和5介绍了NaonPWM的主要特点。

lowEM noise :低电磁噪声
good performance:良好的性能
High efficiency:高效率
Compact size:结构紧凑
Very reliable:非常可靠
Affordable price:可接受的价位
Regular performance:一般性能
High EM noise :高电磁噪声
Complex design:设计复杂
Poor reliability :可靠性较差
Low efficiency:效率低
Expensive:造价高
图4-NanoPWM兼容了线性驱动器和PWM驱动器的优点

图5-相同功率的线性驱动器和PWM驱动器的尺寸对比
性能比较
测试系统包括一个无贴心直线马达带动的直线平台,交叉滚珠轴承机械和基本分辨率为0.4mico-meter的magnascale激光模拟量SIN-COS编码器。运动控制系统包括ACS MC4U控制模块和三种不同的驱动器
• NanoPWM
• Standard PWM标准PWM驱动器
• Standalone linear drive单独线性驱动器
在每个测试中,驱动器和算法都进行一定的调试使其达到最优性能和相似的带宽。
入表2中描述,驱动器具有相同的特性
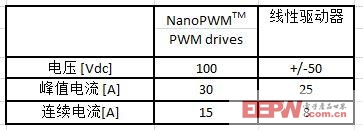
Table 2 – 驱动器的主要性能指标
测试以下性能指标:
静止抖动
低速跟随误差

pwm相关文章:pwm原理




评论