基于EPA的光栅位移测量系统原理及设计方案
本文采用高阈值逻辑(HTL)信号输出的SGC-4.2光栅尺作为位移测量元件。这种光栅尺的特点是阈值电压比较高,因此它的噪声容限比较大,有较强的抗干扰能力。它的主要缺点是工作速度比较低,所以多用在对工作速度要求不高而对抗干扰能力要求较高的一些工业控制设备中。
2.2四倍频电路设计原理
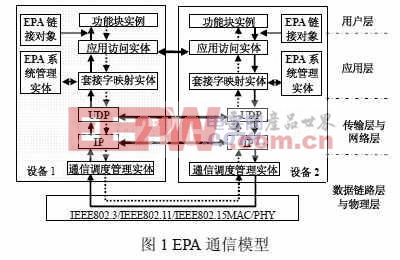
在实际应用中,光栅传感器输出两路相位相差为90°的方波信号A和B。如图1所示,用A、B两相信号的脉冲数表示光栅走过的位移量,标志光栅分正向与反向移动。四倍频后的信号经计数器计数后转化为相对位置。实现计数过程一般有两种方法:一是由微处理器内部定时计数器实现;二是由可逆计数器实现对正反向脉冲的计数。
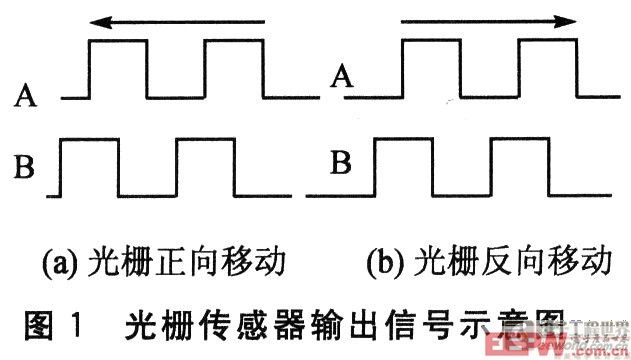
光栅信号A、B有以下关系:
①当光栅正向移动时,光栅输出的A相信号的相位超前B相90°,则在一个周期内,两相信号共有4次相对变化:00-10-11-01-00。这样:每发生1次变化,可逆计数器便实现1次加计数,1个周期内共可实现4次加计数,从而实现正转状态的四倍频计数。
②当光栅反向移动时,光栅输出的A相信号的相位滞后于B相信号90°,则一个周期内两相信号也有4次相对变化:00-01-11-10-00。同理,如果每发生1次变化,可逆计数器便实现1次减计数,在1个周期内,共可实现4次减计数,就实现了反转状态的四倍频计数。
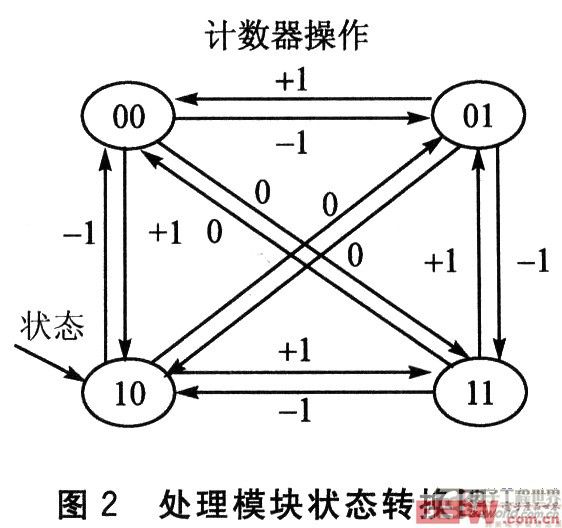
③当线路受到干扰或出现故障时,可能出现其他状态转换,此时计数器不进行计数操作。
综合上述分析,可以做出处理模块状态转换图,如图2所示。其中“+”、“-”分别表示计数器加/减1,“0”表示计数器不动作。
3光栅位移测量系统的总体设计
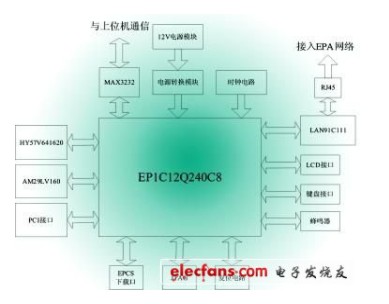
光栅位移测量系统的结构框图如图3所示。系统工作时,SGC-4.2光栅尺将位置信号先转化成HTL电压信号输出,经过调理电路滤波和整流后,处理成标准的方波信号。然后控制器DS80C410通过内部高速计数器对外部的方波信号进行计数运算。一方面向伺服驱动器发布电机动作指令,控制电机驱动位移执行机构运动;另一方面通过以太网收发芯片XT972ALC进行读写操作,将工业现场的测量信息上传到工业以太网络上,便于管理者进行全局决策。




评论