基于磁敏传感技术的位移测量编码与识别
3 应用实例
若图1中的“铁磁性材料下作部件”表示液压缸的活塞杆;“非磁性材料”为特制黑色陶瓷,平整地覆盖在活塞杆表面;“磁敏元件”为霍尔元件,它以两个单位宽度为轴向间隔,绕活塞杆环状布置在液压缸前端,轴线与活塞杆一·致,以便尽可能减少活塞杆的角位移和径向位移的影响,精确测出其位置。
取h=3mm;b=2mm,则相邻霍尔元件轴向间距N---4mm,6位编码的每组码区长度L=30mm。
可知,要识别一个完粘的码区必须设置9个霍尔元件,但为了能随时识别出一个完整码区,必须设置16个霍尔元件。以图2所示时刻位置来说明其丁作过程,其中箭头表示霍尔元件,数字为其编号。
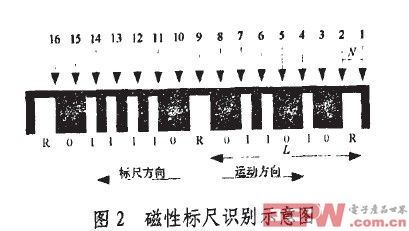
霍尔电路的工作原理是,在外磁场的作用下,当磁感应强度B超过导通工作点时,霍尔电路输出管导通,输出低电-半:若曰值低于释放点时,输出管截止,输出高电半。因此在“凸槽”时钢质活塞杆被磁化,磁感应强度曰增加,霍尔电路导通,输出低电平,用“1”表示;在“凹槽”时输出高电平,用“0”表示。以第1个霍尔元件为测量基准,从图2所示时刻起,位移晕旃次变化b=2mm时,一个码区行程内霍尔电路输出的二进制序列如表2所示。分析可知,序列的标识码为l 0000000 1,其前面或后面6位序列数分别为相邻的两个数值码,这使它具有很强的容错能力。标识码每隔一个霍尔元件间距N在低位部分右移一位。值得注意的是,标识码前面的数值码代表磁性标尺当前检测位置下一个码区的值。
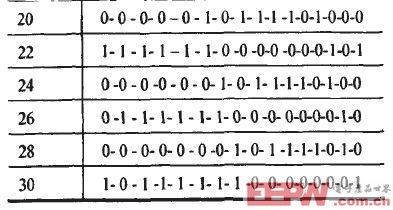
根据霍尔电路识别出的前置数值码,在编码库找到对应的十进制数,假设为x,则磁性标尺行程的粗读数为30×(j,-1)mm:精读数根据标识码l 0 0 0 0 0 0 0 1确定,磁性标尺每左移4mm,标识码则右移一位。若低位不是标识码,则在上一个标识码代表的行程上加2mm。假设标识码右移了a位,则精读数为4xa+b,其中b当尾位为标识码时取0mm,否则取2mm。
综上,液压缸活塞杆的行程读数为S=30(x—1)+4Xa+b此类磁性标尺编码有两人优点:第一,便于找到即时位置的绝对行程值;第二,起校准作用,及时纠正行程计算错误。
4 结语
编码技术广泛应用于交通运输业、商业、测量丁程、制造业等领域,极大地提高了数据采集和信息处理的速度,改善了人们的工作和生活环境,提高了工作效率。本文提出的基于绝对量编码和磁敏传感技术的位移测量方法,以磁场方向变化为检测信号,其电磁转换特性使得整段磁性标尺可看作一个二进制序列,从而通过编码技术狭得被测量。所用方法克服了机械式位移测量系统体积大、精度低的缺点,具有行程长、测量精度与行程长度无关、可靠性高等优点,有较广泛的应用价值。


评论