基于现场总线通讯环境的Multi-Agent系统模型
1. 引言
随着计算机技术和人工智能的发展以及网络的出现与发展,集中式系统已不能完全适应科学技术的发展需要。并行计算和分布式处理的技术应运而生。近10年来,Agent和Multi-Agent系统的研究成为分布式人工智能研究的一个热点,引起计算机、人工智能、自动化、工业控制等领域科技工作者的浓厚兴趣。
现场总线控制系统在控制领域发展迅速。促进了现场设备的数字化和网络化,并且使现场控制的功能更加强大。因此现场总线控制系统将是工业现场控制系统的发展方向。现场总线完成了各个Agent之间的通讯,因而使得Multi-Agent系统在工业中的应用成为了可能。
因此,本文提出了一种基于Agent思想的智能化“三轴门架搬运系统”。在该系统中,具有多个自主性和自适应性能力的Agent。并通过多个Agent之间的协同工作来提高整个系统的可靠性、稳定性和工作效率。
2. Agent及Multi-Agent
Agent在英语中是个多义词,主要含义是有主动者、代理人、作用力(因素)或者媒介物(体)等。目前国内对Agent尚无公认的统一译法。有的译成主体、智能主体、智能体,还有些人把Agent译为代理、媒体、个体、实体。在工业控制中,可把Agent看作是能够通过传感器感知环境,在通过控制器进行理解,最后借助执行器作用于该环境的任何事物,如图1所示。Agent具有自主性、交互性、协调性、目标性、社会性、协作性、持续性、适应性、分布性和智能性10个特性[1]。
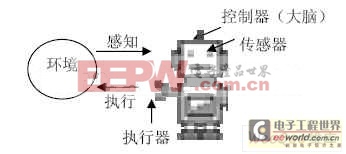
图1 Agent与环境的互交作用
一个含有多个Agent并且协同完成目标的系统称之为Multi-Agent系统(MAS,Multi-Agent System)。采用MAS具有系统运行速度加快、可靠性高、反应速度快等优点。系统中这些Agent在物理上或逻辑上是分散的,其行为是自治的,他们为了共同完成某个任务或达到某些目标而连接起来,通过交互与合作实现复杂问题的求解。MAS必须找出一种使各个Agent能够协同工作的适当方法。这种方法是建立在多个Agent系统资源共享和各Agent自主性之上的。因此,Multi-Agent之间的通讯成为了我们关心的问题。它包括3个方面的内容:通信范式、通信协议和通信语言[7]。MAS的通信范式由共享全局内存、消息传递及二者的结合。他的通信协议包含3种含义:网络传输协议、高层交互型框和对所交换的通信原语的约束。至于MAS之间的通信语言有形式简单、易于理解、语法可开展、方便与其他系统集成,内容具有层次性、语义规范、能保证Agent间通信的可靠性和安全性的要求。
3. 现场总线系统(FCS)
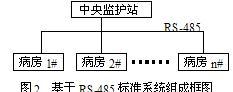
我们可以认为现场总线就是通信总线一直延伸到现场仪表,使得许多现场仪表,如变送器、调节阀、基地式控制器、记录仪、显示器、PLC、便携式终端和控制室自动化设备间可以在同一总线上进行双向多信息数字通信。通常,我们将建立在现场总线基础上的控制系统称为现场总线控制系统(FCS,Field-bus Control System)。FCS具有开放性、互可操作性与互换性、现场设备的智能化、系统结构的高度分散性、现场环境的适应性、系统可靠性和准确性、信息一致性等特性[8]。
1) 系统结构的高度分散性
FCS废弃了DSC的控制站,由现场控制设备议表取而代之,即把DSC控制站的功能化整为零,分散的分配给现场仪表设备,实现彻底的全分布式网络控制。开创了测量与控制领域的新纪元——分布控制时代。
2) 现场设备的智能化
现场总线节点为现场控制设备或仪表,如传感器、变送器、执行器和控制器等,其具有综合功能的智能节点。具有传感测量、信号变换、工程量处理、补偿计算、控制决策、驱动与执行、自校验和自诊断等多项功能,在某节点出现故障的情况能自行关断而不影响整个控制网络系统的继续运行。因此,现场总线控制系统中的现场设备仪表具有高度自主性与自治性的智能节点。
4. Multi-Agent控制理论的理想实现平台——FCS
Multi-Agent控制理论的要点就在于构建一个实时的、分布式的网络化控制计算环境,网络中的各智能具有高度的自主性和自治性,分布式网络环境为各智能体之间的相互协调合作提供一种交互机制。显而易见,根据FCS和MAS特性的分析表明,FCS正是提供了一个这样的实时的、全分布式的网络化控制计算环境,FCS中的现场控制仪表设备智能节点即相当一个个Agent,具有高度的自主性和自治性,开放的现场总线通讯协议和现场总线技术标准为现场仪表设备各个Agent之间提供了相互协调合作的具可互操作性的交互机制。现场总线控制系统成本低,具有理论应用实现的切实经济可行性。因此,FCS和Multi-Agent控制理论相似意味着前者是后者实现的天然理想系统平台[5]。
5. 实现硬件平台
本文采用CAN总线作为系统的通讯平台,构建一个“三轴门架搬运系统”(如图2所示)。三轴门架搬运系统模拟了一个在工作区域为直角平面的机械臂,它用来传送或者拣选工件。该模型由一个能在X轴、Y轴线性方向移动的机器臂②、一个适合沿Z轴方向运动的电磁手(未显示在图片上)、一个带有传输带的工件箱①、工件存放站点③和控制单元④组成。在每个运动方向的末端各有一个限位传感器,控制软件由此判断机器臂的工作区域。
模拟的过程是:金属的工件因工件箱的传输带从工件箱被传送到入站待定位,途中经过识别单元,对工件型号进行识别。机械臂移动到入站待定位上方,电磁手在负Z轴方向运动抓住工件,电磁手复位,机械臂移动到工件型号相对应的存放站的上方,电磁手再次在负Z轴方向运动,电磁手失电消磁,工件被放在这个规定位置,电磁手复位。这个过程就完成了工件的炼选搬运工作。

图2 三轴门架搬运系统硬件设备图
整个系统底层现场总线控制网络采用CAN总线网络。现场监控主机⑤的监控应用程序采用VC编程实现。现场监控主机也作为CAN网络服务器,安装倍福公司的CANOPEN FC510X现场总线接口卡和TWINCAT网络管理和服务工具软件。监控应用程序通过TWINCAT实现与设备节点的通讯。
为了实现整个系统,系统共有分类炼选Agent、单元化Agent、控制Agent和监控Agent四个Agent组成(如图3所示)。
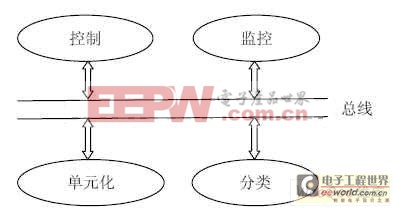
图3 三轴门架搬运系统Agent结构图
1) 控制Agent
控制Agent的主要功能是完成自身的控制算法,并根据任务需要与其他Agent组成动态的Multi-Agent合作系统。控制Agent所需要的控制命令和数据均通过CAN总线传输。在该系统中,控制Agent主要完成的任务是目标位置计算、运输带控制、机械手控制和状态监视。
2) 单元化Agent
单元化Agent相当于一个感知与执行Agent[7]。该Agent不仅能完成信号的采集,提取传感器的信号的特征形成监控变量,通过CAN总线传送给控制Agent。同时从控制Agent接受控制指令,并转化为与现场设备匹配的开关量。该系统中,单元化Agent主要完成的任务是检测工具箱中是否有工件,如果有工件,启动传输带将工具箱最底层的一个工件传送到准备入站的位置。无工件时,就停止传输带。
3) 分类炼选Agent
分类Agent业相当于一个感知与执行Agent。该系统中,该Agent主要完成的任务是分析并确定工件的类型,电磁手的控制和机械手的运动。
4) 监控Agent
监控Agent主要的任务就是在在远程的操作室内对工业现场的观察并且根据情况需要可以对现场设备布置任务。
通过CAN总线整个三轴门架搬运系统实现了各个Agent的通讯,使每个Agent可共享系统资源又可在同一时刻完成各自的任务。因此,整个系统可以安全、协调的完成工件的单元化、分类和搬运一系列任务。
6. 结论
本文结合现场总线技术和Agent理论给出了“三轴门架搬运系统”的Multi-Agent结构,并基于CAN总线技术构建了该系统。系统具有成本低、可靠性和稳定性好,智能化程度高等特点。各个Agent根据不断变化的环境所做出的局部决策,动态的显现出一个切实可行的调度,这样系统就具有较好的反应性和适应性。
本文作者创新点:分布式人工智能中的Agent和Multi-Agent理论在智能机器人的研究中有了一定的发展,但此理论未用于工业控制领域。各个Agent之间的通讯是Multi-Agent 系统在工业控制领域应用的关键,而与现场总线通讯的完美结合使的应用Multi-Agent理论在工业控制领域成为了可能。本文还结合了工业模型三轴门架搬运系统证明了此理论的可行性。



评论