基于PID算法的船舶航迹自动控制

4 航迹控制系统硬件设计
航迹控制系统的其主要功能有对船体的运行状态进行数据采集、控制船体运动和与远程遥控系统进行数据通信,控制系统组成如图5所示。
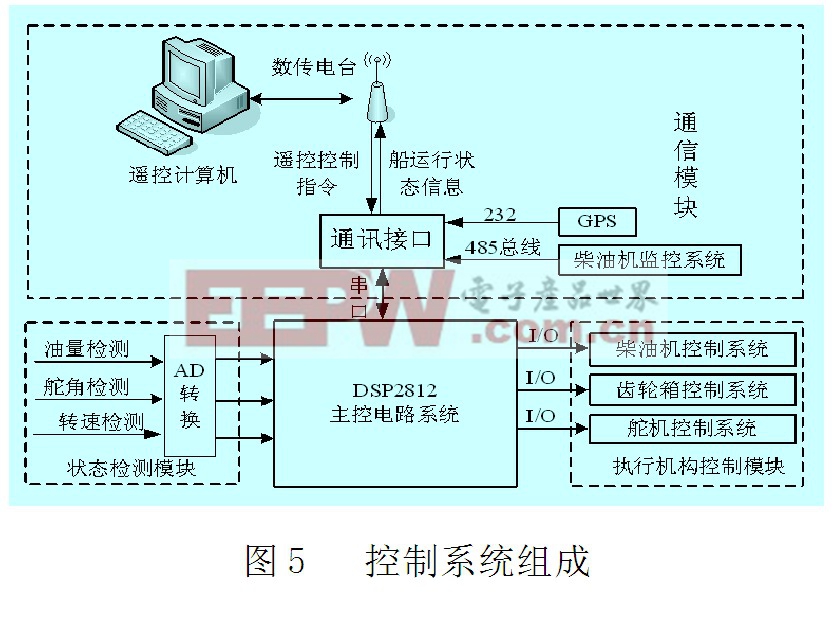
主控制系统以DSP2812芯片为处理器,搭建船舶航迹控制主控系统。通过串口方式接收上位机发送的不同遥控指令信息并进行解码,实现对柴油机、齿轮箱及舵机的遥控控制,其中包括柴油机的启车控制、停车控制和转速控制;舵机控制系统的操舵控制;同时,主控系统还将采集到柴油机及船舶的各种状态信息并通过通讯接口实时发送至遥控计算机上,实现遥控计算机对船体运行状态的实时监测功能。
遥控计算机通过无线通讯模块与主控系统进行信息通讯,获取船体当前运行状态,其中包括船体的实时位置信息、航速信息、当前档位信息以及当前舵角信息。当进行航迹自动控制时遥控计算机需要向主控系统发送计划航迹点坐标数据及启动航迹自动控制指令信息,主控系统在接收到上述指令后,控制系统开始进行航迹控制计算,利用计算输出的舵角控制指令及速度控制指令分别对舵机控制系统、柴油机控制系统进行控制,从而实现航迹控制功能。
遥控计算机还可通过舵角控制指令完成遥控转舵任务,实现远程遥控控制船体改变航向的功能。当需要改变船舶航速时,可利用遥控计算机的速度控制指令实现对船体的航行速度控制。
5 实验分析
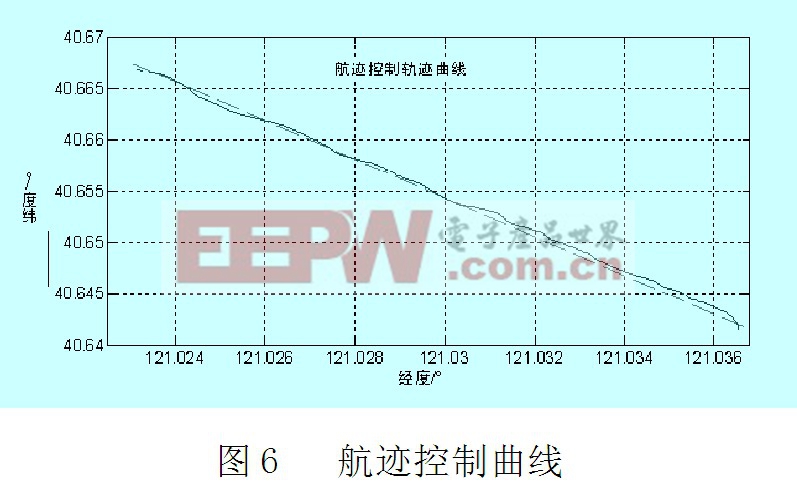
为验证本系统可行性,在3级海况下以一艘30吨小型船为控制对象,该船的船长L为25m,船宽B为5m,满载吃水为1m,航速为7.5m/s进行了基于视线导航策略的船舶航迹PID自动控制实验。
航迹自动控制实验曲线如图6所示,其中虚线为规划航迹,实线为实际航迹曲线。从图6中可以看出,实际航迹与规划航迹平均误差在16m范围内,实现了航迹自动保持的控制效果。
6 结束语
本文介绍的航迹跟踪控制方法与航向PID控制系统相结合形成的船舶航迹自动控制系统,在行为功能上模仿了人工操舵的控制特征。航迹自动控制实验证明本文提出的航迹自动控制算法能够使船舶按照设定的航迹自动航行,从而证明了本文所提出的航迹自动控制系统的可行性。
参考文献:
[1] 张显库,贾欣乐.船舶运动控制[M].北京:国防工业出版社,2006.
[2] 潘为刚,肖海荣,周风宇等.小型船舶自动操舵控制系统的研究[J].船海工程,2009,38(1):68-70.
[3] Erjen Lefeber,Kristin Ytterstad Pettersen,Henk Nijmeijer.Tracking Control of an Under actuated Ship[J].IEEE transactions on control system technology 2003,11(1):52-61.
[4] 李庆中,顾伟康,叶秀清等.移动机器人路径跟踪的智能预瞄控制方法研究[J].机器人,2002,24(3):252-255.
[5] So-Ryeok Oh,Jing Sun.Path following of Under actuated marine surface vessels using line-of-sight based model predictive control[J].Ocean Engineering.2010,(37):289-295.
[6] 李殿璞.船舶运动与建模[M].哈尔滨:哈尔滨工程大学出版社,1999.
[7] S.D.Lee,C.H.Yu,K.Y.Hsiu,et,al.Design and experiment of a small boat track-keeping autopilot[J].Ocean Engineering.2010,(37):208-217.

pid控制相关文章:pid控制原理
pid控制器相关文章:pid控制器原理








评论