传感器网络操作系统平台TinyOS下CC2420驱动组件的设计
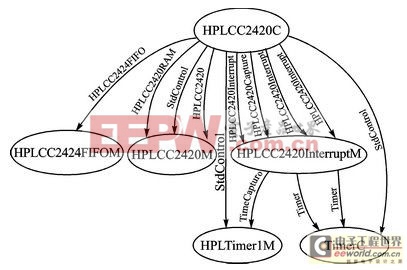
图3 HPL体系结构
HPLCC2420FIFOM模块文件实现了HPLCC2420FIFO接口,完成了对发送、接收数据缓存区的读写控制工作,主要接口函数如下:
//将一串数据写入发送缓存区TXFIFO, 完成后告知TXFIFODone()函数
async command result_t HPLCC2420FIFO.writeTXFIFO(uint8_t len,uint8_t *msg);
//读取接收缓存区RXFIFO中的数据,完成后告知RXFIFODone()函数
async command result_t HPLCC2420FIFO.readRXFIFO(uint8_t len,uint8_t *msg);
HPLCC2420M模块文件实现了3个接口:
① StdControl接口,完成ATmega128L中与CC2420相连的硬件引脚端口电平设置及硬件SPI接口相关寄存器的初始化工作。
② HPLCC2420接口,实现CC2420内部寄存器的读写功能。CC2420有33个控制/状态寄存器、15个命令选通寄存器和2个访问FIFO缓存区的寄存器。
③ HPLCC2420RAM接口,实现对CC2420内部RAM的读写功能。CC2420的内部RAM分为3块--128字节的发送FIFO缓存区、128字节的接收FIFO缓存区以及112字节的用于保存设备地址、密钥等信息的存储区。
主要接口函数如下:
//写CC2420的命令选通寄存器
async command uint8_t HPLCC2420.cmd(uint8_t addr)
//写寄存器
async command result_t HPLCC2420.write(uint8_t addr, uint16_t data)
//CC2420内部RAM读写接口函数
async command result_t HPLCC2420RAM.write(uint16_t addr, uint8_t length, uint8_t* buffer);
async command result_t HPLCC2420RAM.read(uint16_t addr, uint8_t length, uint8_t* buffer);
//读写完成向上调用的事件通知
async event result_t writeDone(uint16_t addr, uint8_t length, uint8_t* buffer);
async event result_t readDone(uint16_t addr, uint8_t length, uint8_t* buffer);
HPLCC2420InterruptM模块文件实现了HPLCC2420Interrupt、HPLCC2420Capture接口,主要完成中断捕捉功能。CC2420使用SFD、FIFO、FIFOP和CCA四个引脚表示收发数据状态,当引脚电平变化时,触发ATmega128L硬件中断。TinyOS平台下,根据事件驱动机制,向上调用HPLCC2420Interrupt(类似HPLCC24240Capture)接口中的事件通告函数 result_t fired (void)进行上层处理。HPLCC2420Interrupt接口中使用result_t startWait(bool low_to high)函数设置触发方式(上升沿还是下降沿),使用result_t disable(void)函数禁止中断使能。HPLCC2420InterruptM模块文件还调用了HPLTimer1M.nc和TimerC.nc文件中的Timer接口函数,完成相关的底层中断处理。
3.2 HAL组件
HAL组件使用HPL组件HPLCC2420C提供的源接口,在CC2420所提供的基本功能的基础上进一步抽象,形成CC2420初始化、设备地址设置、收发模式设置、发送接收消息等复杂功能,同时以组件接口的形式进行封装供上层HIL组件调用。HAL体系结构如图4所示。HAL组件包括两个模块文件CC2420RadioM.nc和CC2420Control.nc,最后由配置文件CC2420RadioC.nc装配起来。
CC2420ControlM模块文件使用SplitControl接口完成CC2420的寄存器初始化、启动等工作,主要函数如下:
command result_t SplitControl.init();//CC2420寄存器初始化
command result_t SplitControl.start();//开启1.8 V稳压源供电,将复位RSTN引脚置为高电平,启动CC2420晶振
CC2420ControlM模块文件还实现了CC2420Control接口,实现对CC2420的一些控制功能:
command result_t CC2420Control.TunePreset(uint8_t chnl);//通信频道设置
async command result_t CC2420Control.TxMode();//设为发送模式
async command result_t CC2420Control.RxMode();//设为接收模式
async command result_t CC2420Control.OscillatorOn();//开启晶振
async command result_t CC2420Control.enableAutoAck();//自动应答帧功能使能
async command result_t CC2420Control.enableAddrDecode();//地址识别功能使能
command result_t CC2420Control.setShortAddress(uint16_t addr);//设置设备地址
CC2420RadioM使用BareSendMsg接口发送消息,使用ReceiveMsg接口接收消息:
command result_t BareSendMsg.Send(TOS_MsgPtr msg);//发送消息
event result_t BareSendMsg.sendDone(TOS_MsgPtr msg,result_t success);//发送完成
event TOS_MsgPtr ReceiveMsg.receive(TOS_MsgPtr m);//接收消息事件通告
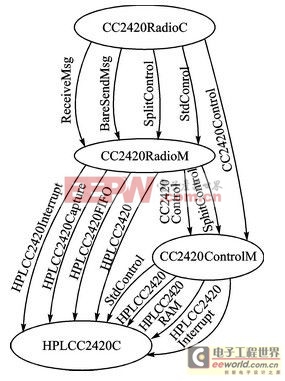
图4 HAL体系结构
结语
首先以TinyOS操作系统为软件平台,根据网络节点的硬件模块功能及其接口电路的特点,在硬件抽象体系结构的原则下,对CC2420无线收发模块在TinyOS 平台下的驱动组件设计作了深入的研究。实验表明,节点在满足指标要求的同时运行稳定可靠。





评论