雷达故障检测应用设计
图6 故障检测专家系统的结构
根据某雷达的整体功能模块的不同,方案将各个功能模块划分为若干检测子系统,利用CAN总线技术构建一个网络结构,每个子系统作为网络上的一个CAN智能节点,每个节点检测该模块中待检测设备的运行状况,并将检测结果通过CAN总线发送给故障检测专家系统。故障检测专家系统运行在上位机上,对下位机发送检测命令,下位机检测预留在各子系统的测试点,把测试的各种数据,如电压、各种开关量等,经A/D转换,发送故障检测专家系统;同时,专家系统根据检测信息和各模块发送的自检信息,给出结论后存储并进行显示,检测员可通过查询主机快速、及时对状态和故障情况判断(见图7)。

图7 雷达系统总体结构
故障检测专家系统在上位机(军用计算机)上运行,操作系统采用Windows XP,采用VC++6.0编写故障检测专家系统和通信模块。下位机采用嵌入式计算机PC104,通过CAN总线负责对整个雷达进行现场数据采集,包括电源电压等的模拟信号,各种开关量信号等。经过A/D转换后,再通过RS-232串行接口将现场数据传送给上位机,下位机的通信程序采用C语言编写。各个模块的自检信息,专家系统可以直接通过CAN总线获取。
此系统采用CAN2.0B的数据帧,有29位标志符,占4字节的长度。定义见表1。

优先级是CAN数据包优先级,占3位,总共有8个优先级。PF为数据类型代码,占8位。PS/DA为数据类型扩展码或目标地址,占8位。当PF值小于240(0xF0)时,PS/DA位填写目标地址DA;当PF值不小于240时,PS/DA位填写数据类型扩展码PS。SA为发送节点的CAN总线地址,占8位。保留位固定填写0。帧ID中PF、PS、DA的值分别取自在CAN数据包中PF、PS、DA的值。
本网络结构采用双CAN总线,每个线路最多可连接110个智能节点,CAN总线传输速率设定为250kb/s,对应的位时间为4μs,网络上所有节点必须设置为相同值。节点数据链路层发送数据以CAN1总线为主,CAN2总线为辅。当CAN1总线拥堵的情况下,CAN2总线启动,如果发送控制器在5ms内仍未完成总线发送,则须取消未完成的发送,以免影响总线上其他智能节点的工作。接收数据通过CAN1总线、CAN2总线分别接收,并分别送给应用程序处理。
CAN总线智能节点的软件设计主要包括:CAN节点初始化、报文发送和报文接受。通过DLL提供API应用层接口编程。
实例应用
某雷达的天馈系统,由天线、天线座、馈线系统、倒伏机构等部件组成。专家系统发送自检命令给天馈系统,系统对自身的各个部件进行自检,自检结果通过CAN总线发回专家系统,其格式见表2。
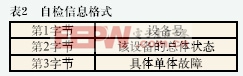
数据格式为3字节,其中,第1字节为设备号,是属于每个功能模块的唯一编号。第2字节是该设备的运行状态,其中,0x0F表示正常,0xFF表示故障,所有单体全部正常时上报正常状态,任意单体故障则上报故障状态。如果是故障状态,则第3字节的8个位,分别代表了各个单体的状态,0为故障,1为正常。
专家系统根据自检发回的信息,判断故障是否为最终故障,如不是则进行原理检测,最后给出检测结果。
对于不同设备的自检,有着不同的检测层次,天线座则可以检测到各单体,给出具体哪个单体故障,如果故障仍然不是很明确,需进一步检测,则可以转到原理检测,最后检测到不可分割或可以直接替换的单体。










评论