基于ARM-Linux的MAX1303接口与驱动程序设计
2 系统硬件设计
已提到,模/数转换器MAX1303可以通过SPI/QSPI/MICROWIRE兼容的串行接口进行控制。由于SPI比较常见,并且协议简单,本系统使用SPI协议控制此AD芯片。然而,虽然LPC3250有内置的SPI控制器,但本系统选择使用LPC3250的GPI/O口模拟SPI接口对MAX1303进行控制。下面分析原因。
已提到,MAX1303有7中工作模式,其中,有3种用于数据采集。这3种工作模式是:外部时钟模式;外部采集模式;内部时钟模式。这3种采集模式各有优缺点。外部时钟模式的吞吐率最高,同时,给处理器带来的负担也最高;内部时钟模式吞吐率次之,能适当减轻处理器的负担;外部采集模式的吞吐率最低,但却能最大限度的减轻处理器负担。由于LPC3250性能强大,所以系统在采集数据时,使用吞吐率高的外部时钟模式。然而,使用外部时钟模式时,不像使用内部时钟模式和外部采集模式,处理器向MAX1303写完控制字和转换启动字后,只需等待MAX1303的SSTRB引脚输出的转换结束信号,然后就可以读取转换结果。使用外部时钟模式,需要精确的控制时钟个数,这使得在驱动程序中,要经常修改SPI的相关控制器,而且还要通过查询来确定时钟的个数。如果使用LPC3250的GPI/O口模拟SPI协议控制AD芯片就简单的多。控制GPO口不断翻转输出电平就可以产生时钟信号,而且可随意控制时钟个数。对于发送数据,只需要简单的把数据字节的每个位根据时钟变化通过GPI口输出给AD芯片。读取数据与发送数据是一个相反的过程,但类似。本文引用地址:http://www.eepw.com.cn/article/201610/306026.htm

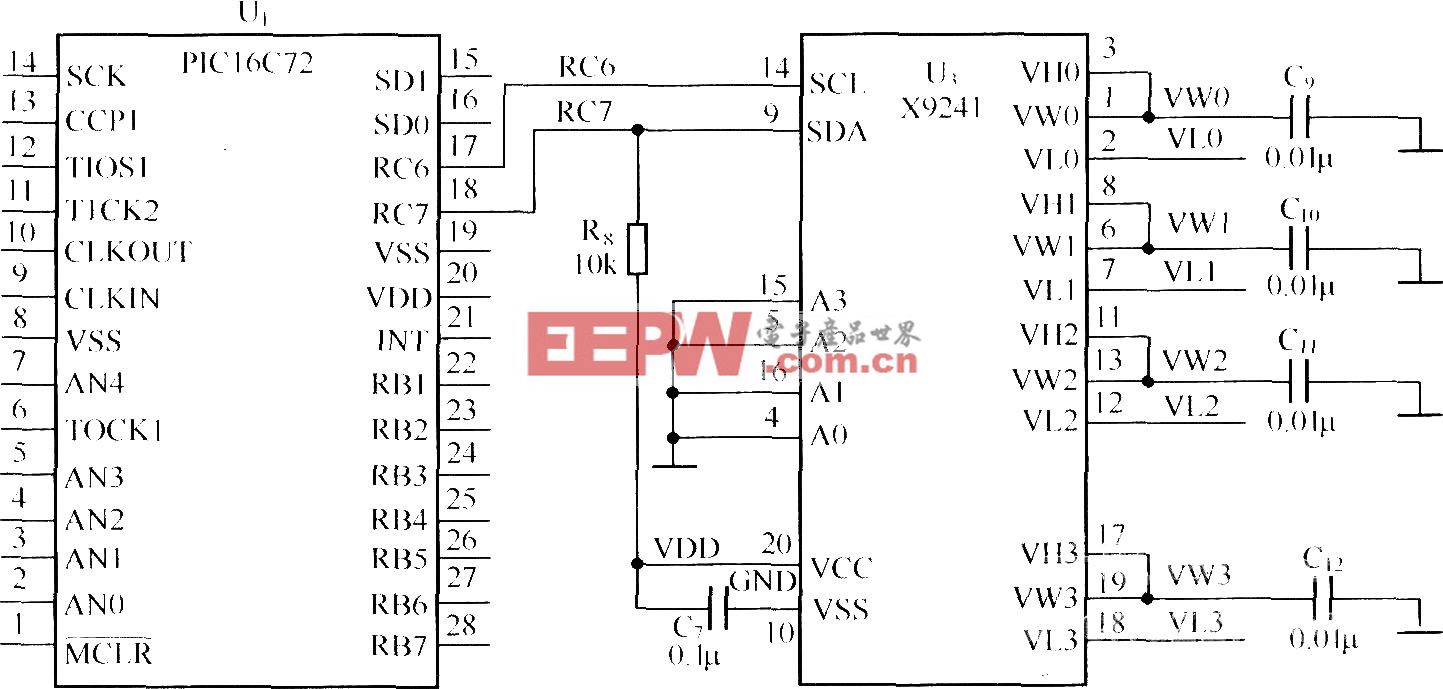
所以,用GPI/O口模拟SPI总线控制MAX1303非常简单。本系统有两路模拟信号需要采集,使用单端输入,MAX1303的另外两个输入端接地。LPC3250与MAX1303的硬件连接如图2所示。
3 Linux下设备驱动程序设计
设备驱动程序是应用程序和硬件之间的桥梁,它为应用程序屏蔽硬件细节,并将硬件封装成一个文件的形式。当应用程序需要操作硬件时,只需操作硬件相对应的设备文件即可。Linux对设备的分类有许多种,常见的分类是将设备分成3种:字符设备、块设备、网络设备。这三类设备对应3种设备文件。不同设备的开发模式以及与内核的接口也不相同。MAX1303属于字符设备,本文将分析Linux2.6.29内核下MAX 1303的字符设备驱动设计方法。
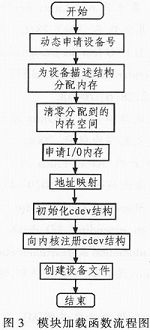
设备驱动程序与应用程序不同,应用程序从main函数开始执行,而驱动程序在被安装时,则是从module_init宏指定的函数处开始执行。module_init宏指定的函数被称为模块加载函数,它可以看成是驱动程序的入口。它通常完成地址映射,向内核注册并初始化cdev结构,创建设备文件等工作。模块加载函数的程序流程图如图3所示。
与模块加载函数对应的,有一个模块卸载函数,此函数由module_exit宏指定,它在驱动模块被卸载时执行。它主要完成的工作包括:销毁设备文件;注销设备所对应的cdev结构;释放内存;注销设备号。
Struct cdev在内核内部被用来表示设备,这是一个非常重要的数据结构。它内部有一个成员结构structfile_operations,用于连接设备编号和驱动程序的操作。这个数据结构包含一组函数指针,这一组函数的实现是设计驱动程序的重点和难点。这一组函数有很多,但根据项目需求,本系统只实现open,write,read,release 4个函数。










评论