基于TMS320F2812物探GPS接收机设计与实现
CEP分析:为了对厂家所标定的(单机定位:小于2.5 m(2DRMS))指标进行检验,在天气晴朗的条件下,对采集的4个点的实测数据,利用计算圆概率误差的方式进行了分析;其中,每个点的测试时间为5 min,各得到300个数据点。计算得到圆概率误差半径,采用Matlab软件编程作图得到圆概率半径图,如图5所示,只列出一个图。本文引用地址:http://www.eepw.com.cn/article/197476.htm
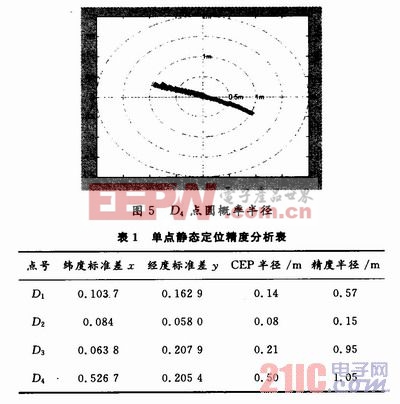
由图5可见,所测的点都包含在半径为1.05 m的圆内,具体计算的各个点的定位实验数据见表1所示。
从表1可知,所测数据中精度半径最大的为1.05 m。而各个点的圆概率误差半径(CEP)最大值为o.5 m,这些数据小于接收机的标定位置精度1.042 m(CEP)(由2.5 m(2DRMS)换算来)。
3.2 动态测试方案与分析
为了在运动中检验测量精度设计了本项实验。实验地点在西操场上,沿预操场的第一跑道和第三跑道绕行一周后回到原点,分别进行4次实验。绕行过程中保持匀速。对所采集的数据进行提取、转换处理后,用Matlab软件对数据进行仿真,将实测经纬度换算成距离单位后,画出4次实验的轨迹图见图6。
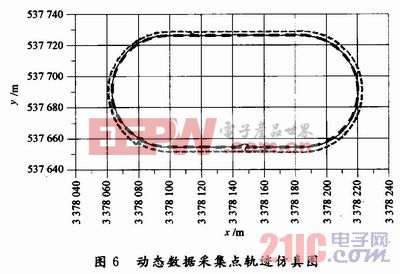
图6中,里面两圈是在第一跑道线上,外面两圈是在第三跑道线上的轨迹图,每条跑道宽1.2 m,这两条线间的距离为2.4 m。虽然在行走过程中所得到的轨迹点与直线轨迹存在误差,但是大致上还是比较理想的。实验轨迹相距最大偏离距均在1 m以内,与静态定位精度基本一致。
分析其中最大偏差部分析其存在误差的主要原因是:在行走过程中,由于不能始终保持天线在一个水平面上,以及未能保证行走的路线完全重合所造成的。总体来讲,该定位轨迹图能较好地反应实际的形状。说明该GPS模块动态定位性能还是比较好的,可以用于较准确的实时导航。
综合静态和动态测试结果表明,使用的新月-HC12AGPS模的圆概率误差半径(CEP)最大值为0.763 9m,小于其标定位置精度1.042m(CEP),说明厂家提供的精度参考值可靠。
所得到的单点的精度半径(100%点)约2m,小于生产厂家给的(2.5m),说明该模块可以满足多数情况下物探测网的平面测量精度要求,表明系统设计方案可行。
4 结语
本文通过对整个接收机系统的研究和设计,主要得到以下结论:
(1)所选用的GPS-OEM定位精度能满足设计需求。在配合使用右旋极化陶瓷介质天线进行的单机静态测试结果表明,单点定位精度小于1m,由4次动态测试可得该接收机的导航的最大偏差也在1 m左右,能满足大多数地球物理勘探的平面测量精度要求。
(2)设计GPS接收机系统的整体思路是正确的。选用中低档的GPS-OEM来设计实现单点定位精度较高、价格适中的GPS接收的思路是正确的,实现了用中低档GPS-OEM和较好的接收天线来研制高精度GPS接收机的设想,也为后续的设计者提供了借鉴。
(3)提出的整体的设计方案是可行的。选用DSP芯片和GPS-OEM板开发GPS接收机是可行的,能达到实时定位的功能要求;选用的TMS320-F2812DSP芯片能满足实时性的要求。其中所设计的DSP模块电路可以能满足系统要求。


评论