基于SPCE061A的智能轮椅避障控制系统的设计
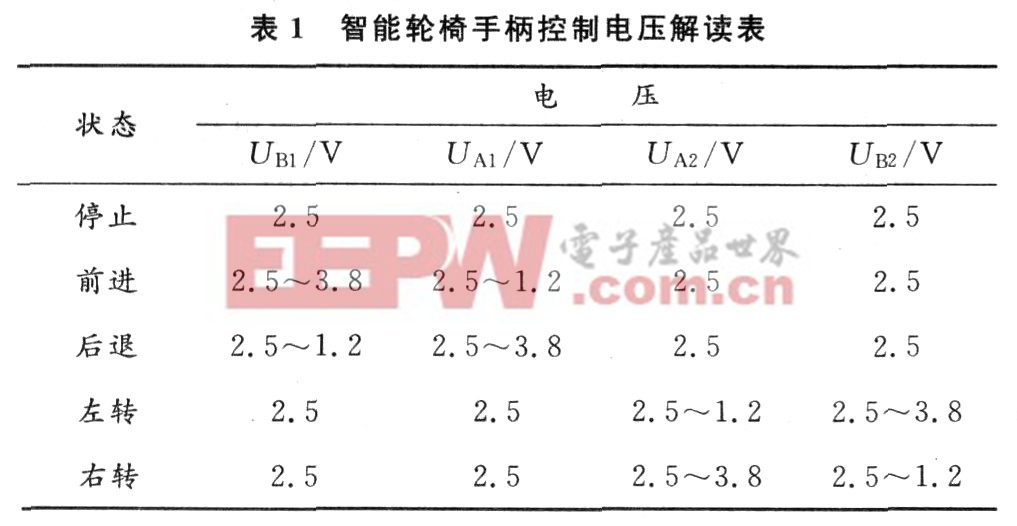
本课题的D/A模拟电路的B1,A1,A2,B2的电压输出分别代替了黄、褐、兰、白四条线的电压输出。所以通过两个D/A转换器TLV5618的输出,代替了手柄控制,具体转换电路如图3所示。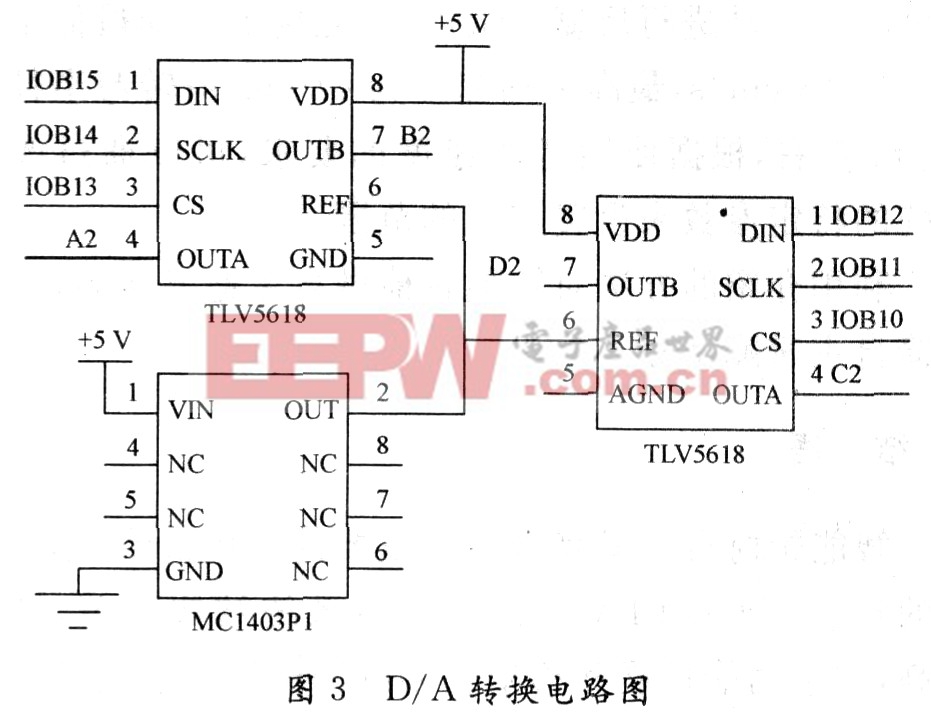
TLV5618与凌阳61单片机的3个I/0口相连,分别是数据串口DIN、时钟信号SCLK、片选信号CS。MC1403只有3只脚有效,VDD,VSS及供给DA 2.5 V的参考电压。
1.4 电源模块
电路驱动模块中用到了24 V,12 V,5 V三种电源,选用24 V,24 Ah的高能充电蓄电池作为动力能源,它为电机直接提供24 V工作电压,12 V,5 V分别通过7812,7805芯片由24 V转换得到。
2 智能轮椅自主避障软件设计
系统软件是在61单片机集成开发环境IDE2.O.O上开发的,该集成开发环境集程序的编辑、编译、链接、调试以及仿真等功能为一体,具有友好的交互界面,使用户的编程、调试工作更加方便且高效。
主程序设计如下:
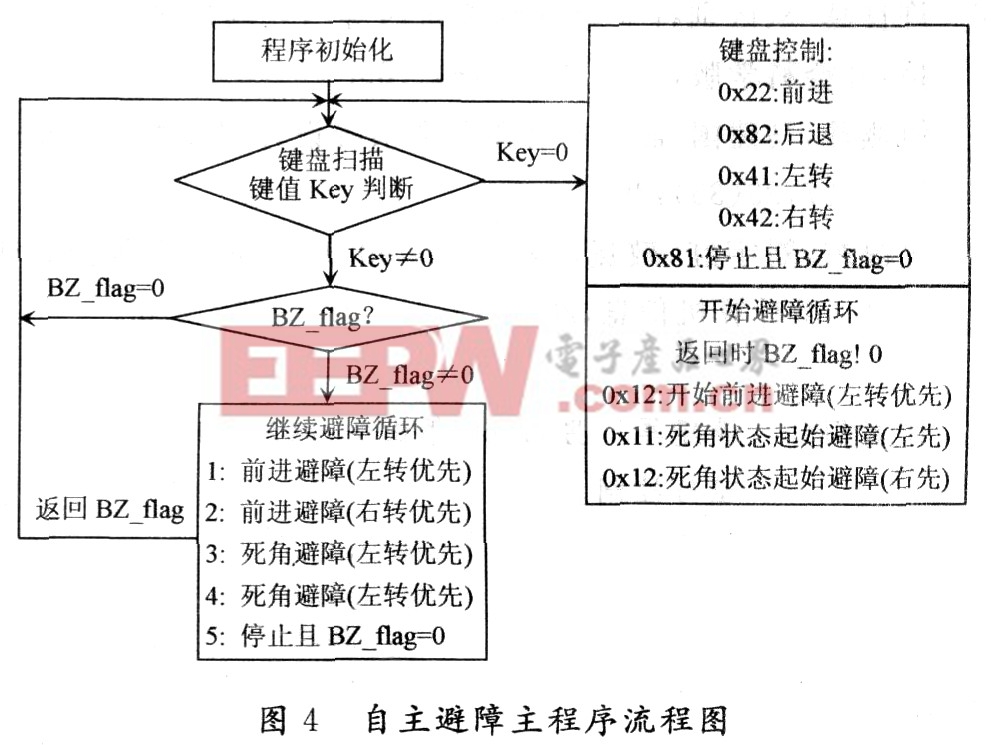
主程序主要是通过扫描键盘,等候用户指令,不在避障状态下扫描等候,而进入避障状态后会根据探测到的环境选择相应的避障策略。在避障过程中若用户按下停止键则退出避障循环,主程序采用键盘扫描,节约了61单片机的中断资源,同时也减小了对测距的干扰,增加了智能轮椅实时避障的灵敏度。主程序流程图如图4所示。
3 实验结果分析
选用实验室外空旷环境作为轮椅运动的测试环境,对轮椅的运动进行反复测试可知,轮椅的运动最低平均速度为16 cm/s,最高平均速度为41 cm/s;转弯半径为50 cm左右,根据使用者对速度的要求,可以通过改变系统的特定参数来设置速度的范围。
利用介绍的方法对智能轮椅做自主避障实验,智能轮椅自主避障良好。
4 结 语
智能轮椅自主避障具有很重要的实用价值,本文设计的基于SPCE061A的自主避障系统结构简单,性价比高,易于功能扩展和移植。系统测试结果表明该系统基本达到实用化要求。












评论