用CCD摄像机获取高速运动目标的图像
摘要:在超速抓拍系统中,如何用CCD摄像机获取高速运动目标的图像是决定方案论证及系统设计成败的关键。文中对电子快门速度和成像的关系及用普通摄像机捕捉高速运动目标可能产生的问题进行了分析并提出选用非标摄像象机时应考虑的几个主要方面。
关键词:CCD摄像机 物像关系 电子快门 逐行扫描 帧频率
1 引言
近几年,国家对基础建设的投资日益加大,公路建设更是水涨船高。现代化交通监理的需求越来越迫切。公安部已提出:科技强警,向科技要警力。超速抓拍系统正在这种形势下提出的。
超速抓拍系统实际上是一种智能化交通监理系统ITS(Intelligent Transportation Systems).受测速雷达触发,CCD摄像机将超速行驶的目标抓拍下来,然后通过数据采集系统将模拟图像数字化,并送PC机进行图像信号处理,压缩后经由网络与网络主机进行交互。提供监理部门执法依据。
在此系统中,由于抓拍目标是高速运动的,一般在80km/h以上,有的甚至达到180km/h。因此,如何用CCD摄像机完成对高速目标的清晰捕捉是首先应解决的关键问题。
2 CCD摄像机的原理
2.1 CCD摄像机概述
CCD摄像机是一种固体摄像机。CCD是电荷偶合型光电转换器件,用集成电路工艺制成。它以电荷包的形式储存和传送信息。主要由光敏单元、输入结构、和输出结构等部分组成。
CCD有面阵和线阵之分。光敏元排成一行的称为线阵CCD,面阵型CCD器件的像元排列为一个平面,它包含若干行和列的结合。本文所介绍之摄像机为面阵型。
2.2 CCD摄像机原理
根据转移和读出的结构方式不同,有不同类型的面阵摄像机。常见的类型有两种:帧转移型FT(Frame transfer)和行间转移型ILT(Interline transfer)。这两种类型的摄像机的工作原理基本相同。下面以敏通公司MTV-1301型黑白行间转移型摄像机为例来介绍其原理。
如图2.1所示,MTV-1301型CCD摄像机包含四部分:CCD光电传感器、CCD传感器驱动器、图像处理板、供电电源。CCD传感器是一个由542×582个光敏二极管构成的光电传感器阵列。其结构为行间转移型。这种器件光敏面积大,靶面利用率高。当景物的光学图像,经由摄像物镜投射到这个阵列上时,由于各光敏二极管受光的强弱不同而感生出不同量的光电荷。这些感生电荷,经过一定时间(一场)的积累,在转移栅的控制下,水平地移送到与像元对应的设置在光敏元旁边的垂直移位寄存器中,而后又在行转移脉冲的控制下,将电荷移送到水平移位寄存器,并由水平移位时钟控制依次向输出端转移,最后由输出电路输出视频信号。由CCD传感器输出的视频信号已具有较大幅度(0.5V以上),经由处理电路进行处理(包括自动增益控制、校正、同步信号混合、功率放大等),在终端得到全电视信号输出。
3 高速目标图像的获取
3.1 静态目标图像的获取
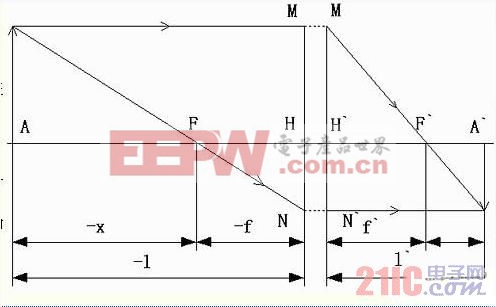
根据光学理论,画出理想光学系统的物像关系,如图3.1所示。
其中:l表示物点A到物方主点H的距离,称为物距。
l`表示像点A`到像方主点H`的距离,称为像距。
f表示物方焦距。
f`表示像方焦距。
假定光线的传播方向自左向右为正向光路,则从H点到A点或由H`到A`点的方向与光线传播方向一致则为正,反之则为负。在图3.1中,l为负,l`为正。原点取在物距和像距相应的主点。从而有如下的物像关系式:
f`/l`+f/l=1 (3.1.1)
当光学系统位于同一介质(如空气)中,则f`=-f,从而(3.1.1)变为:
1/l`-1/l=1/f` (3.1.2)
此公式就是高斯公式。表示了以主点为坐标原点的物像关系。
由高斯公式不难看出,当被摄目标处于静止状态时,CCD摄像机的分辨率只要足够高,就应该能摄到此分辨率基础上的清晰图像(因为,“清晰”是与分辨率紧密联系在一起的)。也就是说,目标只要是在大于两倍镜头焦距的位置范围,而镜头的变焦范围足够的大且连续,那么,在成像位置和大小一定的情况下(因为,CCD的成像靶面大小固定),并且,其他的光学条件都满足时,理论上讲任意远的物体都应该能清晰地成像(这也就是为什么有的天文望远镜的镜头长达数米的原因,它可提供足够大的变焦范围)。当然,当CCD摄像机的像素数目一定时,其成像的清晰度则主要受CCD像素数目的限制。
也就是说,当成像大小和位置一定的情况下,对于任意物距都只有唯一的一个焦距与其对应从而得到清晰的图像。物距变化时焦距必须变化图像才可能清晰。反之,物距不断地或大或小地变化,而焦距不变,那么光学系统所成图像将肯定是模糊的。模糊的概念就是分辨率不够高,即分不清图像的细节,相反清晰就是分辨率高能看到图像更多的细节!这也正是傻瓜像机不能照出很清晰照片的原因。因为它的焦距是固定不变的。当然,它有一个最佳点来得到清晰的图像。对于不管什么地方的物体,它都以一种模式去对待,怎么能得到清晰的图像呢?当我们有时要求不高时,比如看清楚人的眼睛等较大较粗糙的对像时,在很大一个范围,我们都认为得到了清晰的图像,虽然实际上是不清晰的,因为,它得分辨率不够,看不到图像的细节。
3.2 高速目标图像的获取
当被摄物体处于高速运动时的情况可不像静态时那么简单。特别是用于高速公路监理的超速抓拍系统更是如此。下面就以超速抓拍系统为例来分析如何获取高速运动目标的图像。
如图3.2所示:
H:摄象机与测速仪架设高度
20°:测速仪波束轴与水平面(地面)夹角
12°:摄象头光轴与水平面夹角
R2:雷达波束打到地面上其中心与架高之间的水平距离
R5:摄象头光轴和地面交点与架高之间的水平距离
ΔR1:雷达波束区域
ΔR2:摄象机摄像区域

测速仪相关文章:测速仪原理
激光二极管相关文章:激光二极管原理







评论