DSP(Digital Signal Processing,数字信号处理)中会使用大量的数学运算。Cortex-M4中,配置了一些强大的部件,以提高DSP能力。同时CMSIS提供了一个DSP库,提供了许多数学函数的高效实现。 这次就先做一个简单的尝试,求两个向量的数量积。 一、 硬件
MAC单元 MAC(Multiply-ACcumulate,乘积累加),是DSP中常用的一种运算。Cortex-M4配置了一个32位的MA
关键字:
SAM4E
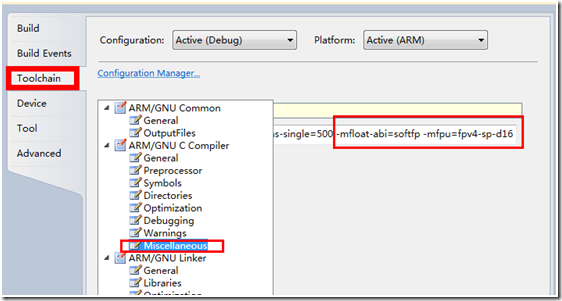
浮点单元(Floating Point Unit,FPU),是用于处理浮点数运算的单元。 为使用FPU,除了需要启用FPU外,还需要对编译器进行设置,以使其针对浮点运算生成特殊的指令。虽然在Atmel Studio 6中,开发板使用的工程模板中默认就完成了这两部分工作,但这次仍然对设置的方法进行介绍,同时简单测试一下FPU的效率。 一、 编译器设置 AS6.1 SP2中,使用的编译器为arm-none-eabi-gcc.exe,版本为4
关键字:
SAM4E
FPU
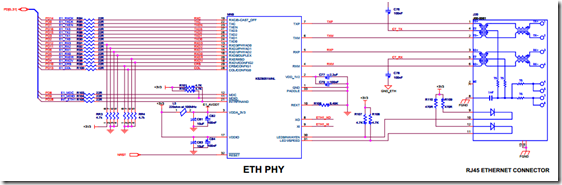
网络通信的作用不用多说,而这次进行的工作即是对以太网通信过程中,需要用到的硬件部分进行初始化,也介绍了发送和接收数据的方法。 由于较为复杂,所以使用了ASF框架。但是也会对用到的库函数的实现做一个介绍。 一、 MAC、PHY和MII IEEE 802.3是现在常用的以太网标准,它定义了物理层(Physical Layer, PHY)和介质访问控制层(Media Access Control, MAC)的标准。另外,在OSI模型
关键字:
SAM4E
GMAC
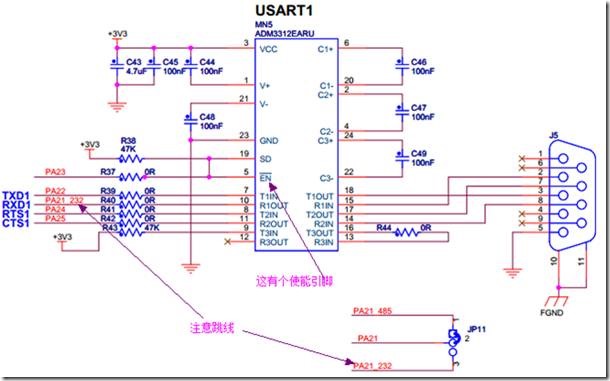
DMAC也可以和外设进行数据交互。之前我们曾使用PDC进行USART的数据回显,这次就使用DMAC完成相同的工作。而且由于DMAC有内部的缓冲区,实现起来更为简单。 一、 USART设置 因为之前已经做过相关的实验,这里不再重复。需要注意的是,要注意JP11的跳线,以选择正确的协议(RS232)。另外,如果使用硬件握手协议的话,注意设置PC端串口通信软件的线路控制信号。 另外,由于不再使用手动的缓冲区和PDC,所以不需要进行相关的设置。同时,也不用再使用USART的接收超时功能。 二
关键字:
SAM4E
USART
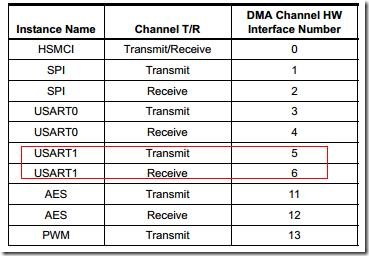
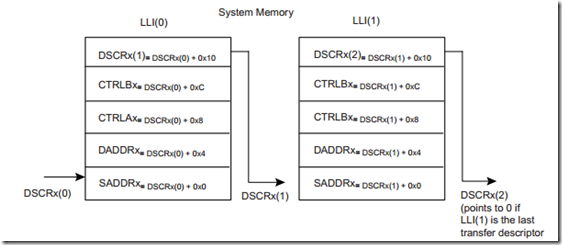
这次使用这个DMAC的Multi-buffer传输功能,将两个缓冲区的内容拷贝至一个连续的缓冲区中。 一、 DMAC 在M4中,DMA控制器(DMAC)比外设DMA控制器(PDC)要复杂,但是功能更加强大。 为适应不同的传输要求,DMAC 可以进行灵活的自定义配置,甚至配备了一个FIFO缓存。比如可以为源设备和目标设备分别设定传输时,地址的变动方式(递增、递减或固定);以及一次传输的数据量(字节、半字或字)。 DMAC有4个通道,每个通道可以进行一个传输任务。进行传输的设备
关键字:
SAM4E
DMAC
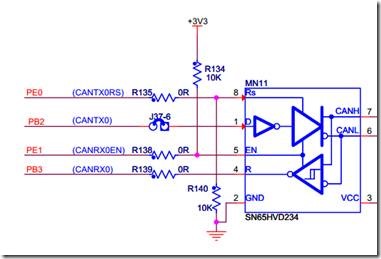
CAN协议具有良好的可靠性,在工业中应用广泛。这次就先熟悉CAN的基本功能。 开发板有两个CAN,每个CAN有8个信箱。这次内容是从CAN0的信箱0发送数据到CAN1的信箱0。 除本次使用的功能外,CAN还有远程帧、强大的错误处理功能。 一、电路 CAN总线上的逻辑数值是用显性电平和隐性电平表示的。“显性”的意思是指在同时传输显性电平和隐性电平时,总线上呈现的是显性电平。显性电平表示逻辑“0”,隐性电平表示逻辑“1”。 在使用CAN的过程中,需要使用一个CAN收发器进行电平的转换与解释。开发
关键字:
SAM4E
CAN
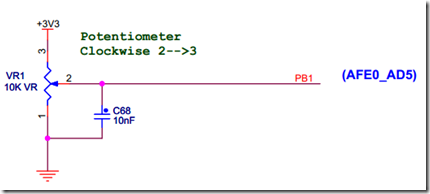
很多时候,一个电压不仅仅需要定性(高电平或者低电平),而且要定量(了解具体电压的数值)。这个时候就可以用到模数转换器(ADC)了。这次的内容是测量开发板搭载的滑动变阻器(VR1)的电压,然后把ADC转换的结果通过UART打印出来。同时,也简单介绍了校准的方法。 SAM4E芯片中,ADC是由AFEC管理的。同时,AFEC可以使用一个多路复用器以选择需要转换的信号的通道,也可以通过平均多次ADC转换的结果以提高转换精确度。 一、 电路图 通过顺时针方向旋转该变阻器,PB1引脚电压将变大,其
关键字:
SAM4E
ADC
交互还是很有必要的,而且使用键盘和显示器的交互效率还是很高的。当然,可以直接使用UART进行字符的输入和输出。但是又何必浪费了C的标准输入输出的格式控制之类的功能呢? 这次内容就是使用scanf() 和printf() 函数进行PC和开发板的交互。 一、 C标准函数库 与硬件相关的功能,最终都需要直接访问硬件。这一点,C的标准函数库的实现面对众多的硬件设备,已经无能为力了。 Atmel Studio使用的C标准库的实现疑似为Newlib。 在工程的&n
关键字:
SAM4E
UART
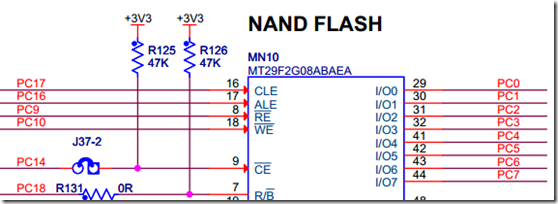
这次大概介绍了一下NAND Flash,以及在ASF中使用它的方法。 一、 接线 这个开发板搭载了一个256 MB,8位的NAND Flash(MT29F2G08ABAEA)。引脚接线如下:
偷个懒,直接上引脚复用的图。其中PC14表明该NAND FLASH需要作为SMC的外设0使用。通过使用NANDOE和NANDWE引脚说明需要使用芯片的NAND Flash控制逻辑。另外,PC18复用为输入
关键字:
SAM4E
NAND
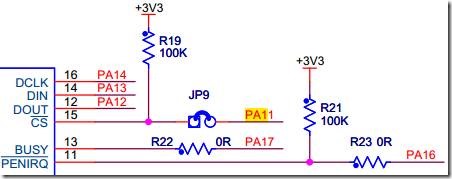
开发板上配了一个电阻触摸屏,它的控制器是ADS7843,使用SPI进行通信。这次实现的功能是通过SPI接口与该控制器交互,获取触摸屏点击的坐标,并显示在LCD上。略为难点的是SPI作为同步时钟的一种,需要判断时钟的极性以及相位。 为了突出主题,就没有对电阻屏进行校准,显示的是控制器原始的输出值。 一、 电路图
PA12、PA13和PA14引脚的外设A为SPI相关引脚,PA11为SPI的NPCS0。即,该控制器连接在SPI的片选设备0。 二、
关键字:
SAM4E
SPI
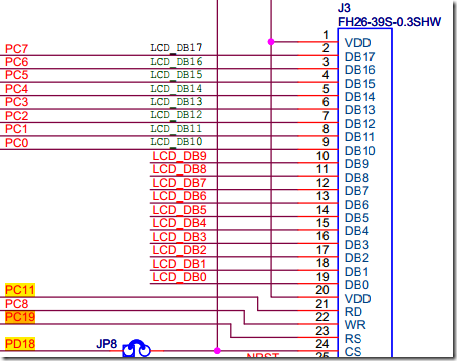
在上个例子中,已经在ASF添加了ILI93xx模块,并做好了相关的声明。这次就做好SMC的配置,然后使用ASF提供的API在屏幕上打印出”Hello World!”字样。 一、 电路图
开发板的LCD连接器的接线如图所示。这些连线均按照SMC相应引脚的功能进行了连接,这样的意图很明显就是要让SMC来和LCD进行交互。 有两个引脚需要注意: PD18引脚的外设A是NCS1,即让LCD连接至SMC的片选设备1中。 RS线表示“寄存器
关键字:
SAM4E
LCD
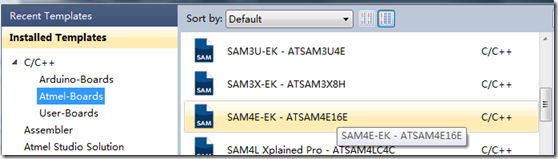
在Atmel Studio 6中,集成了Atmel Software Framework(ASF框架)。通过它提供的库,可以很快速地完成新的项目。 这次的最终目标使用ASF在LCD上显示出文字“Hello World!”,现阶段目标是点亮LCD的背光,学习目标是了解怎么样使用ASF提供的模块。 一、 ASF Wizard 新建一个项目,根据所使用的开发板选择模板。
然后可以通过AS
关键字:
SAM4E
LCD
清楚了UART的用法之后,现在来研究一下USART的用法。和上一次差不多,这次也通过USART的串口来实现和PC的通信。和上一次不同的是,USART本身就有接收超时的功能,所以这次就不用TC了。 USART和UART相比,功能多了许多,可以配置的选项也更多。虽然最主要的差别是USART可以实现同步通信,但PC的串口没有这个功能,所以我们就先不拿这个功能开刀了。 一、 思路 实现思路和上一次使用UART的PDC差不多,区别只是这次直接使用USART的接收超时功能,而不用TC。 二、&n
关键字:
SAM4E
USART
使用PDC进行数据的收发能减少CPU的开销。这次就使用PDC进行UART数据的接收与发送,同时,也利用TC也实现了PDC的接收超时。 PDC是针对外设的DMA控制器。对比DMA控制器,它更为简便,与相应外设的结合也更为紧密。比如说,要配置PDC时,首先要启用相应的外设的时钟;同时PDC收发的状态是通过外设上的寄存器反映出来的;甚至中断也是通过相应外设产生的。 使用PDC时,只需设置好传输时内存的地址,以及传输长度,就可以在外设和内存之前进行数据传输了。而SAM4的PDC甚至还提供了一个类似FIFO
关键字:
SAM4E
UART
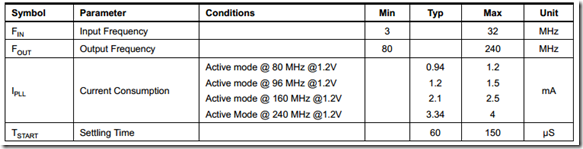
为使用更更高的波特率,则需要更更高的外设时钟的频率。这个时候就需要用到锁相环(PLL)了。锁相环可以对输入的时钟进行分频、升频后进行输出。MCK可以使用的锁相环为PLLA,而PLLA的输入时钟为MAINCK。 本节将配置MCK频率为120 MHz,UART波特率为115200 Hz。 一、 PLLA的限制 使用PLLA时需要考虑到它的限制,不然配置失败了也不好找原因。 对输入输出时钟频率的限制
PLLA的输入时钟范围需
关键字:
SAM4E
UART
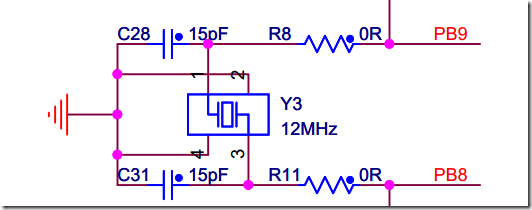
为得到更高的带宽,需要使用更高的波特率。UART波特率的计算已经介绍过了,现在就尝试下调整外设的时钟频率。可以有多种方法调整外设时钟(MCK)的频率,这里先介绍先主要时钟(MAINCK)的设置,其中包括外部晶振的使用。 外设的时钟(MCK)可以在慢时钟(SLCK)、主要时钟(MAINCK)和MAINCK经锁相环升频后的时钟PLLACK三者中选择,并可以对选择的时钟进行分频。重置时,MCK使用的时钟为MAINCK,且不分频。 MAINCK可以选择使用一个嵌入的快速RC振荡器,或是一个晶体振荡器产生时
关键字:
SAM4E
UART
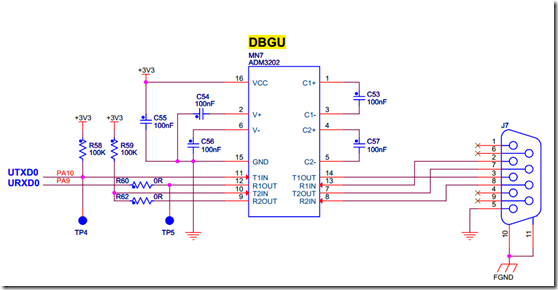
通信还是比让LED灯闪烁实用得多的。 这次试试使用UART,实现开发版和PC间的通信。功能比较简单,就是把PC发向开发版的内容发送回去。这次主要介绍一下UART的配置,至于通信,则使用较为简单的不断查询UART状态寄存器的循环实现。 一、 准备工作 UART作为异步串口通信协议的一种,所以必须先要准备一根串口线。用串口线将PC的串口和开发板的DBGU口连起来。 同时,在PC上需要准备好串口通信软件。 二、 电路
DBGU有两个
关键字:
SAM4E
UART
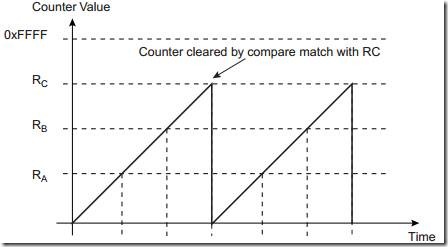
RTT主要用做一个全局的定时器,而且不太通用。现在尝试使用一个更为通用的定时器进行定时:定时计数器(Timer Counter, TC)。 TC提供了广泛的功能,主要可以分为对输入的测量,以及波形的输出。同样,它可以产生一系列的中断。这一次将使TC以一个固定的周期产生中断,以达到定时的目的。 一、 TC配置 1. 在PMC中使能TC时钟。 2. 时钟选择。 TC的每个通道内部都有一个32位的计数器。可以为这个计数器选择一个时钟,使其以固定频率
关键字:
SAM4E
LED
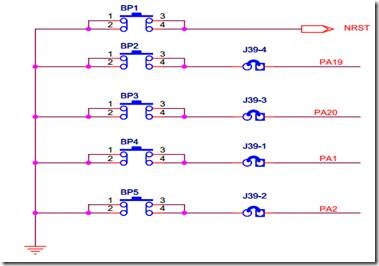
现在试试用按钮控制LED灯……让LED在一个按钮按下时亮起;弹起时灭掉。 主要目的是学习GPIO的输入及中断。 一、 电路
图中的J39-n是几个跳线插座,位置在开发板LCD附近,往下进行前要先确保跳线是接通的。 可以看到,当按钮按下时,引脚接地。即若引脚接个上拉电阻,则在按钮弹起状态下,引脚处于高电平状态;而在按钮按下时,则处于低电平状态。 这次使用的按钮是BP3,即PA20引脚;LED为蓝色LED,即PA0。 二、 最简单
关键字:
SAM4E
PWM在高频情况下,一个很好的用处就是通过控制占空比来控制输出的功率,比如控制风扇转速、LED灯的亮度等。这次就利用PWM的中断功能,动态改变脉冲的占空比,来实现呼吸灯的效果。 一、实现思路 PWM可以选择让计数器在周期结束产生中断(在周期中央对齐时,可能选择在周期中央也产生中断),并且可以在运行的时候动态地调整占空比、周期、极性等属性。所以可以在中断处理函数中动态地改变占空比以改变LED灯的亮度。 这次也将使用通道0和引脚PA0。 二、PWM设置 这里需要用到较高频率的时钟,所以选择使用主
关键字:
SAM4E
PWM
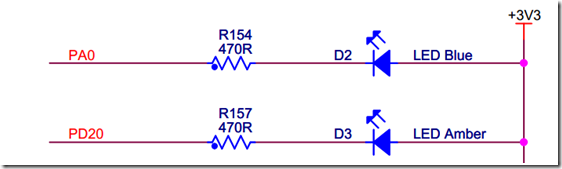
两个LED灯虽然可以闪了,但是总是需要CPU的参与。现在尝试使用一种更为自动化的方法:让脉宽调制(PWM)控制器输出具有一定周期和占空比的方波,以此控制LED灯的亮灭。 一、实现思路
依然使用蓝色和琥珀色的LED灯。开发板上能启用四个PWM通道,每个通道能输出两个互补的方波。我们会启用其中的一个通道,然后让这个通道的两个输出分别控制一个LED灯。但是由于这两个引脚上不存在同一通道的输出,所以需要第三个引脚辅助。 我们将使用PWM的通道0。 1.&nb
关键字:
SAM4E
PWM
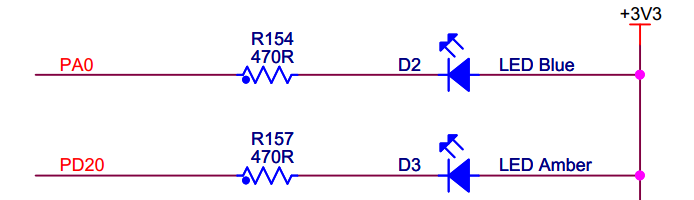
让一个LED灯闪烁不过瘾,我们应该让这块开发板完成一点更高难度的任务:比如让两个LED灯闪烁。 …… 当然了,以我们的现在使用的空循环技术,还是可以实现这点的。但是这样显得略为低端。所以我们使用一个高端点的技术:中断。还有就是会介绍一下在CMSIS里怎么使用中断。 一、电路
二、实现思路 第一个LED的闪烁还是用之前使用的空循环吧,别把世界弄得太复杂了。 第二个LED的闪烁就稍微自动化一点了:使用一个定时器,让它在到了需要切换引脚电平的时候通知我
关键字:
SAM4E
LED
之前我们使用空循环,达到了延迟的目的,但是这样子的延迟比较不精确。现在就使用实时定时器(RTT)来进行更为精确的计时。RTT虽然不是特别通用,在某些单片机上可能没有,但它较为简单。 RTT内部有一个计数器,并且可以配置这个计数器的时钟。通过配置以及计算,就可以得出经过一段时间后,该计数器的增加值。和之前一样,我们使用空循环来完成延迟,只是延迟退出的条件变为“计数器增加了一个特定的值”。 一、 RTT配置 为实现这个功能,需要配置的主要就是分频数了。RTT的时钟可以选择对慢时钟(SCLK
关键字:
SAM4E
LED
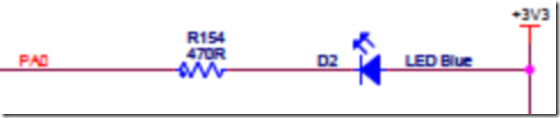
最近因为导师要写一本关于SAME4单片机的书籍,而我也作为一个嵌入式的初学者看了这本书。现在也让我写写几个小的程序,做做示例。既然写了文档之类的,就发到博客上来吧。 目前关于这芯片能参考的书籍大概就只有英文手册了。用的板子是SAM4E16E。IDE用的是Atmel Studio。既然是学习单片机,就没有使用asf框架,而是直接采用访问寄存器的方法了。 第一个程序就是控制板子上一个LED灯的闪烁了。 一、电路
通过查看电路图,可以发现有一个蓝
关键字:
SAM4E
LED
爱特梅尔公司(Atmel® Corporation)宣布扩展ARM® Cortex™-M4快闪微控制器(MCU)阵容,增添具有先进的连通性外设、一个浮点单元(FPU)、先进的模拟功能,以及更高处理能力的SAM4E系列器件。
上述的丰富特性使得SAM4E器件成为用于工业自动化、家居和楼宇控制、机器至机器通信、汽车配件市场和能源管理应用的理想器件。
爱特梅尔SAM4E ARM Cortex-M4 处理器MCU的最高运作频率为120MHz,提供了更大的处理能力,带有一
关键字:
ATMEL
微控制器
SAM4E
sam4e介绍
您好,目前还没有人创建词条sam4e!
欢迎您创建该词条,阐述对sam4e的理解,并与今后在此搜索sam4e的朋友们分享。
创建词条
关于我们 -
广告服务 -
企业会员服务 -
网站地图 -
联系我们 -
征稿 -
友情链接 -
手机EEPW
Copyright ©2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《电子产品世界》杂志社 版权所有 北京东晓国际技术信息咨询有限公司
京ICP备12027778号-2 北京市公安局备案:1101082052 京公网安备11010802012473