- 1 什么是实时操作系统?
实时操作系统是确定的,意思是指系统需要在明确的截止时间内做出响应。这种确定性很重要,其原因有多种,例如,如果最终应用正在监控工业流程,那么必须在特定时段内对事件做出响应,工业控制系统就属于这类情况。
可根据满足截止时间的能力对RTOS进一步分类为三种不同类型的RTOS,每种类型都以不同方式满足截止时间。在hard RTOS中,错过截止时间被视为系统错误。而对于firm RTOS就不是这样,偶尔错过截止时间是可以接受的。在soft RTOS中,错过一次截止时间会减少
- 关键字:
RTOS SDK 信号量 Zynq µC/OS-III
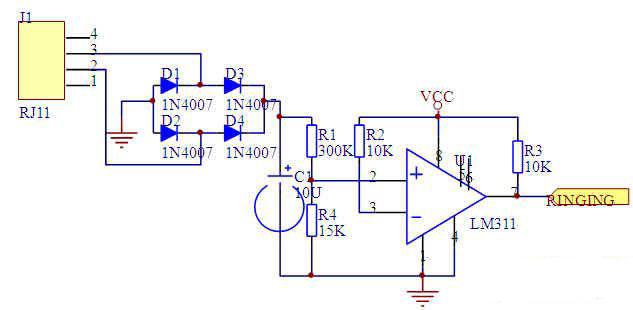
- 在嵌入式系统中为提高微型机系统的可靠性和安全性, 常用的方法就是使用“看门狗”。看门狗分硬件看门狗和软件看门狗。硬件看门狗采用“看门狗”电路, 通过定时器, 对微型机任务即“喂狗”在运行时间上加以约束, 任务必须在最大指定时间范围内完成, 否则重启系统。软件看门狗采用处理器内部定时器, 把任务的理论最大运行时间作为时间约束, 如果该任务超过了这个时间跨度, 则强制退出本次任务。上述看门狗采用的是单任务的顺序机制, 容易实现。在多任
- 关键字:
uC/OS-II LPC2132
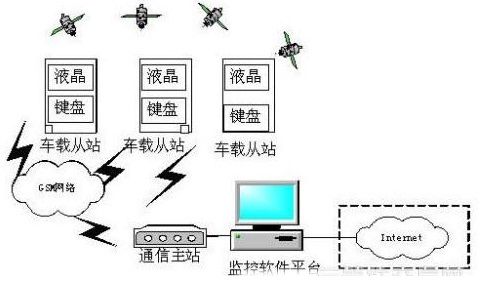
- 一、车辆调度系统的整体设计:
整个系统包括四个部分(1)通信主站;(2)车载从站;(3)通信链路。(4)系统监控部分。下面对各个部分的功能做一个简单的介绍。
(1)通信主站:完成信息的转发,它是连接系统监控部分和车载从站的纽带,它将从系统监控部分来的信息转发给车载从站。并且接收车载从站的信息,并将信息上传给系统监控部分。
(2)车载从站:被监控的对象,接收监控调度命令,并可以返回自己的状态信息。状态信息的取得是依靠在车载从站中的GPS接收机来完成车辆位置和速度信息等的采集工作。
- 关键字:
ARM7 UC/OS-II
- 引言
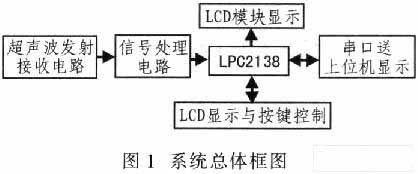
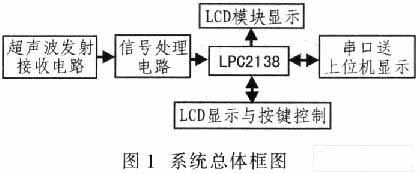
超声波指向性强,能量消耗缓慢,在介质中传播的距离较远,因而用于距离测量。利用超声波检测往往较迅速、方便、计算简单、易于实时控制,且测量精度能达到工业实用要求,因此在移动机器人的研制中得到广泛应用。移动机器人要在未知和不确定环境下运行,必须具备自动导航和避障功能。超声波传感器以其信息处理简单、速度快和价格低的特点广泛用作移动机器人的测距传感器,实现避障、定位、环境建模和导航等功能。
2 系统总体设计方案
2.1 超声波测距原理
2.1.1 超声波发生器
超声波为直线传
- 关键字:
LPC2138 μC/OS II
- uc/GUI嵌入式图形系统不依赖于uc/os,可以轻松在中高端微控制器上移植成功,具体的移植过程网上已经有很多,按照步骤来大多能成功。目前来说实现虽然uc/gui3.90并不是最新的版本,但却是入门使用的不二选择,是比较经典的版本,网上的教程也较多,适合新手学习。
uc/GUI3.98版本中实现了GIF动画显示,比较有意思,但是3.90版本里面并没有实现此功能,今天就一步步教你在ucGUI3.90版本中实现GIF动画显示。
一、 准备工作
首先准备好一个工程,要求工程已经实现了UCO
- 关键字:
uc/os UCGUI
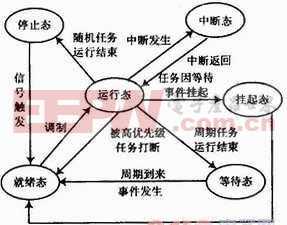
- μC/OS-III相比于μC/OS-II做了很多的改进,是一款全新的内核,在效率方面有了很大提升,并且支持任务的时间片轮转调度,摒弃了一些不必要的内容,如消息邮箱,对于熟悉μC/OS-II的工程师来说,上手μC/OS-III还是比较容易的,先来了解一下μC/OS-III做了哪些具体的改进。
一、时钟节拍的改进
在RTOS中,任务可通过调用延时函数(如OSTimeDly( )函数)将自己延时挂起一段时间,任务在延时的过程中会释放CPU,延时的任务不占用宝贵的CP
- 关键字:
RTOS μC/OS-III μC/OS-II
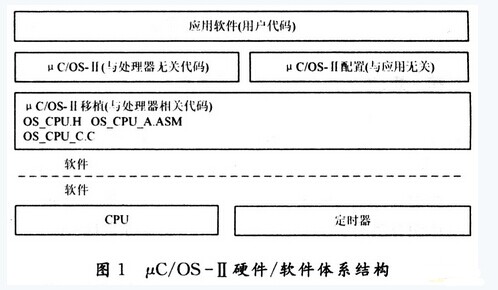
- μC/OS-II嵌入式实时操作系统自1998年推出以来,因其方便移植、代码量小、实时性强、可靠性高、内核可剪裁等优点,成为我国计算机嵌入式应用领域最受喜爱的实时操作系统(Real-Time Opreating System)之一。由于其源码开源,至今,已经成功在诸多厂家的MCU上移植并应用在各行各业的电子产品之中,因而备受瞩目。此文帮助有意向学习μC/OS-II的初学者全面的、系统的了解实时系统的核心思想,也为正在学习μC/OS-II的童鞋们理清思路,更上层楼。
什么是μ
- 关键字:
μC/OS-II CPU RTOS
- 嵌入式操作系统是ARM CPU的软件基础,从8位/16位单片机发 展到以ARM CPU核为代表的32位嵌入式处理器,嵌入式操作系统将替代传统的由手工编制的监控程序或调度程序,成为重要的基础组件。我们将对三种在ARM CPU上较为流行的嵌入式操作系统作详细的分析。
- 关键字:
μC/OS-II μCLinux 嵌入式Linux
- 1 引言
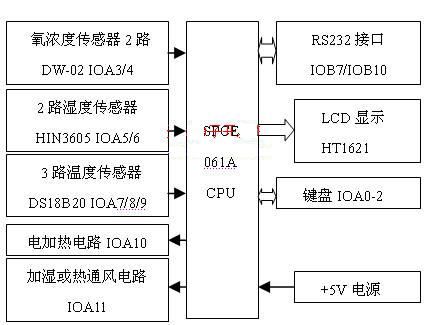
随着嵌入式系统的广泛应用,原来单一传感器的嵌入式系统逐渐向嵌入式多传感器系统发展。由此提出了多传感器任务调度分配的问题。本文结合红薯保鲜储藏工程涉及到的温度湿度氧浓度等参数要求,采用高性能16位单片机SPCE061A作为控制芯片,移植可裁剪的多任务实时操作系统μc/OS-II管理多任务的处理,选用高精度温度传感器DS18B20、湿度传感器HIH3605、氧浓度传感器DW-02构建了一个高精度高性能高可靠性的多传感器嵌入式测控系统,各个被控参数可调范围宽,较好的满足了工程要求。系统
- 关键字:
μc/OS-II DS18B20 SPCE061A
- 引 言
目前,嵌入式系统在工业控制、家用电器、移动通信、PDA等各种领域得到了越来越广泛的应用。由于用户对嵌入式产品的性能要求越来越高,程序设计也变得越来越复杂,这就需要一个通用的嵌入式实时操作系统来对其进行管理和控制。对移植了操作系统的嵌入式系统进行设计和开发,可以大大减小程序员的负担,对于不同的应用可以按照相同的步骤来完成系统的设计。
μC/OS-Ⅱ是一种简单高效、源代码公开的嵌入式实时操作系统,具有良好的可扩展性和可移植性,被广泛的应用到各种嵌人式处理器上。μCOS-Ⅱ操
- 关键字:
ARM S3C44B0x μC/OS-Ⅱ
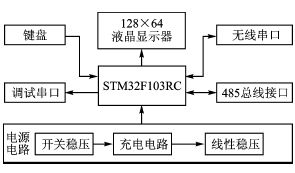
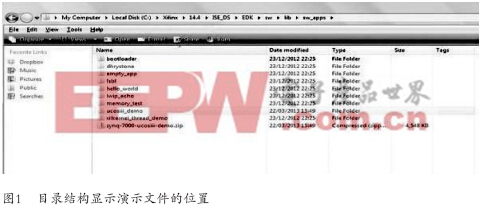
- 电动轨道车控制系统一般分为多个子系统,子系统受一个主控器控制。这样的结构设计繁琐,编程复杂。采用μC/OS-III操作系统、STM32F103RC微控制器、12864液晶屏、PVC按键、无线串口模块、锂电池等实现具有人机界面、无线串口功能的总线主控器。该控制器具有人机界面、轨道车主控器、遥控接收器、遥控面板等多种功能,并且能在不同项目中使用。(※ μC/OS-III从官网上下载,文件名为Micrium_uC-Eval-STM32F107_uCOS-III,版本为V1.29.01.00。)
- 关键字:
μC/OS-III STM32 12864
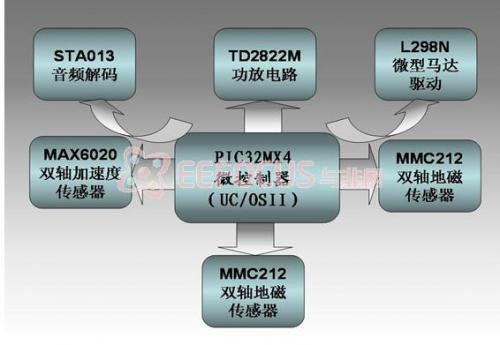
- μC/OS-II操作系统是一种抢占式多任务、单内存空间、微小内核的嵌入式操作系统,具有高效紧凑的特点。它执行效率高,占用空间小,可移植性强,实时性能良好且可扩展性强。采用μC/OS-II实时操作系统,可以有效地对任务进行调度;对各任务赋予不同的优先级可以保证任务及时响应;采用实时操作系统,降低了程序的复杂度,方便程序的开发和维护。 μC/OS-11非常适合应用在一些小型的嵌入式产品应用场合,在家用电器、机器人、工业控制、航空航天、军事科技等领域有着广泛的应用。
单片机、ARM、
- 关键字:
μC/OS-II ARM FPGA
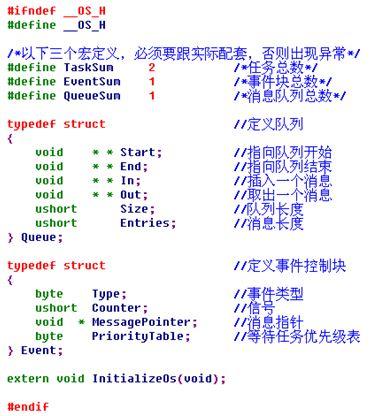
- uC/OS-II是最早进入国内的一款开源RTOS,因为代码开源,又有配套的书籍,加上不大的代码量,在嵌入式群体中最为流行。在写“实用单片机系统”第一版之后,就接触了uC/OS-II,虽然大致的明白其工作原理,但一直似懂非懂,尤其有太多的宏定义,严重的干扰了源码的阅读,加上RTOS带来太多的概念,而这些概念都没有实际用过,不知道如何应用,并且听说有很多陷阱,所以心里有些空,把握不住风险,一直都回避RTOS。高频机开发的后期,菜单界面编程的复杂性严重的干扰了业务逻辑,逼迫我设计ms
- 关键字:
嵌入式微系统 uC/OS-II RTOS
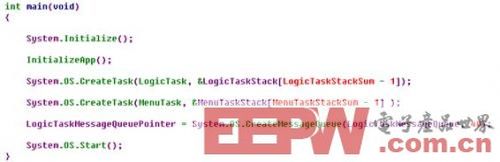
- 为了解决多人协作,多种需求产品的开发,并且还要长期维护,必须要把这些产品的共性提取出来。
1、 不需要低功耗设计。
2、 传感器类和驱动器类属于单一功能的设备,传统前后台架构的MS3即可。
3、 电源类及控制类设备都属于功能复杂的,实时性要求高,带有屏幕显示,外扩多路传感器或者驱动器的设备,这两类可以统一为一类,是设计的重点,需要建立全新的平台。
那么这个新平台应该做成什么样子,脑子里还是没有概念的,只是知道在高频机设计中,传统的状态机或者函数指针方式的菜单界面编程方式是要改进
- 关键字:
嵌入式微系统 msOS uC/OS-II
os-wait函数介绍
您好,目前还没有人创建词条os-wait函数!
欢迎您创建该词条,阐述对os-wait函数的理解,并与今后在此搜索os-wait函数的朋友们分享。
创建词条
关于我们 -
广告服务 -
企业会员服务 -
网站地图 -
联系我们 -
征稿 -
友情链接 -
手机EEPW
Copyright ©2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《电子产品世界》杂志社 版权所有 北京东晓国际技术信息咨询有限公司

京ICP备12027778号-2 北京市公安局备案:1101082052 京公网安备11010802012473