- 基于超声波避障技术是建立在获取机器人前方障碍物的距离和位置信息上,故超声波避障技术主要运用超声波传感器,根据超声波测距原理,结合矩阵式结构设计理念的数据融合对机器人前方障碍物的距离和位置进行定位。
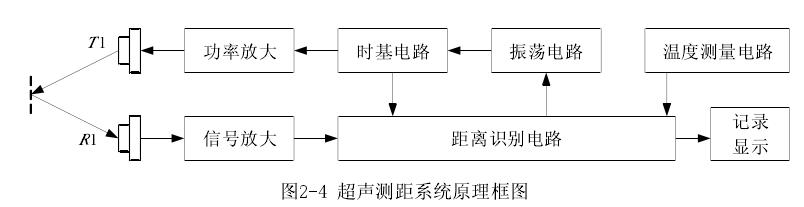
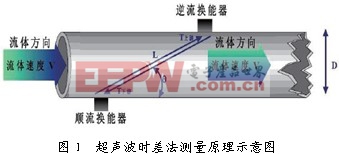
超声波测距技术的方法有很多,如相位检测法、声波幅值检测法和渡越时间检测法等。本论文是采用超声测距最常用的方法渡越时间探测法。即在声速已知的情况下,通过测量超声波回声所经历的时间来获得距离。其原理图如图所示。
图1:超声波测距原理图
为了建立一个智能扫地机器人避障
- 关键字:
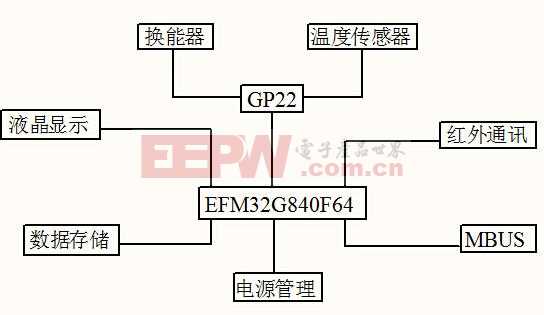
TDC-GP22 扫地机器人
- 模数转换器(ADC)、数模转换器(DAC)听的多了,时间数字转换器(TDC——Timer Digital Converter)是什么原理的器件?为什么是ARM CortexM3,而不是M0、M4? 还有,超声波水表这种创新产品形式是否到了大规模商用阶段呢?本文将介绍TDC-GP22在智能超声波水表中起到何种关键作用,ARM CortexM3 MCU如何在超低功耗突破方面再助一臂之力?
- 关键字:
世强 TDC-GP22 ARM MCU 超声波
gp22介绍
您好,目前还没有人创建词条gp22!
欢迎您创建该词条,阐述对gp22的理解,并与今后在此搜索gp22的朋友们分享。
创建词条
关于我们 -
广告服务 -
企业会员服务 -
网站地图 -
联系我们 -
征稿 -
友情链接 -
手机EEPW
Copyright ©2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《电子产品世界》杂志社 版权所有 北京东晓国际技术信息咨询有限公司

京ICP备12027778号-2 北京市公安局备案:1101082052 京公网安备11010802012473