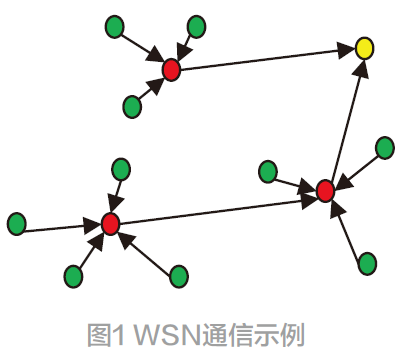
- 在无线传感器网络(WSN)中,传感器节点及其中心节点相距一定距离,以确保在相关区域上的完全覆盖。然而,传感器节点之间的通信距离与能源消耗成正比,最终的传输距离受到限制。为了克服这个问题,在每个集群的头节点之间建立基于集群的布局和消息路由算法,以确保WSN实现良好的覆盖,平衡各节点工作负载和流量负载,并延长整个网络寿命。在本文中,我们使用遗传算法(NEA)来解决复杂的多目标WSN布局和信号路由问题。实验结果表明,NEA是解决问题的有效途径。
- 关键字:
202304 进化算法 无线传感器网络 网络优化 路由路径
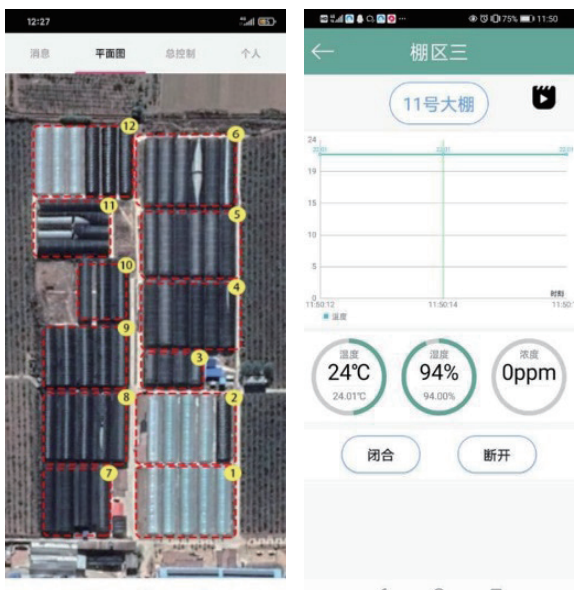
- 本文设计并实现了一种以STM32L010为核心,基于物联网,MQTT协议和APP的低功耗智慧大棚控制系统。该系统采用分布式节点,使用锂电池供电,将大棚的环境信息上传至云端服务器,显示在大屏终端上;并实现手机端APP对大棚作物的观察以及对喷水、卷帘设备的远程控制。此外,提出了自动化远程升级功能,提升设备维护的便利性。
- 关键字:
202304 低功耗 物联网 智慧大棚 远程升级
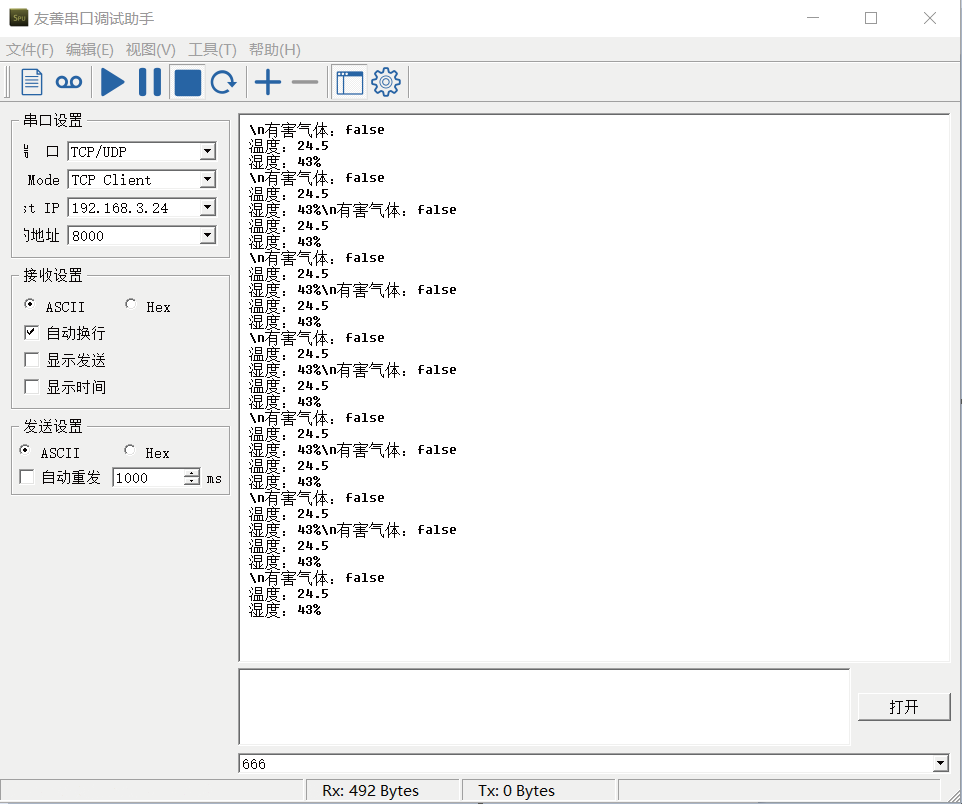
- 为满足工业生产过程车间中的环境监测需求,提出了一种基于ARM核心单片机,气体传感器,温湿度传感器,摄像头和Wi-Fi图传模块,姿态传感器模块的车间环境监测机器人,并设计了其软硬件方案。机器人通过滑模控制器进行平衡底盘角度的镇定,PID控制器进行平衡底盘速度的镇定,保证了机器人底盘的通过性能。在实验室环境中进行实验。
- 关键字:
202304 ARM 车间监测 传感器 机器人

- 设计了以STM32F103C8T6芯片为主控的智能物流机器人,并对机器人系统性能进行分析。电机调速动态指标中调节时间平均为560 ms,超调量平均34.6%。随着电机转速增大,调节时间呈减小趋势。机械臂跟踪性能在PID控制下表现良好,平均每2.5 s完成跟踪目标并准确抓取,实物系统有良好的稳定性、可靠性和准确性。
- 关键字:
202304 STM32 OpenMV PID 机械臂 物流机器人

- 因交叉路口的信号灯常为固定周期控制,在面对不同方向车流量不同时无法做出合理的调整,出现绿灯方向无车辆通过,而红灯方向却有大量车辆等待的现象。故本文设计了一个智能交通信号系统,以树莓派为控制核心,搭载OpenCV库,利用帧间差分法、虚拟线圈计数思想、车道模板提取进行对车流量、信号灯前车队长度的获取,最后使用基于专家系统的模糊控制器对获取到的数据进行模糊计算得到一个相对合理的绿灯时间,以降低交叉路口时间分配的不合理,减少交通拥堵。
- 关键字:
202304 OpenCV 车流量检测 帧间差分 虚拟线圈计数 专家系统
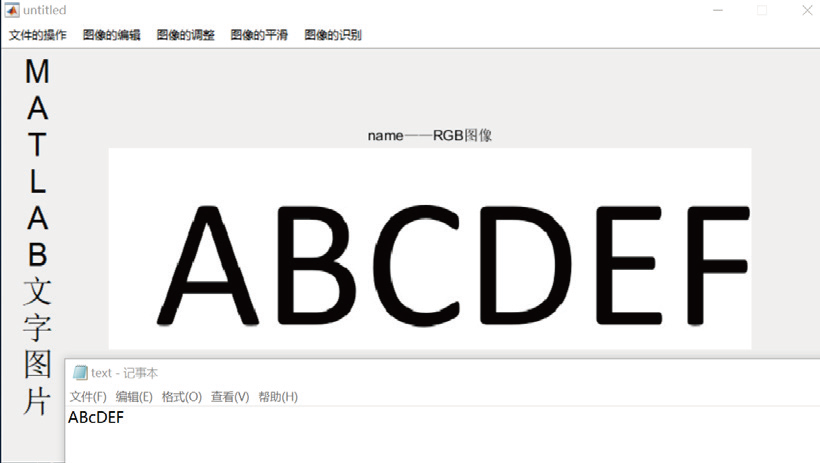
- 设计一个基于MATLAB/GUI的可视化文字图片识别系统。系统主要包含三部分,分别是图像预处理、文字分割和文字模板的匹配识别、GUI可视化界面设计。图像预处理包含图像旋转、图像裁剪、灰度变换、图像增强和二值化等;然后对二值化后的图像进行文字的分割,分割后的字符与数据库里面的文字模板进行匹配识别,最后输出识别的文字内容。处理算法调试成功后,设计一个可视化用户界面。系统完成后调试系统,输入样本图像检测识别结果。经多次测试,本系统可以较为准确地提取并识别图片上的文字信息。
- 关键字:
202304 MATLAB/GUI 文字分割 匹配识别 可视化
202304介绍
您好,目前还没有人创建词条202304!
欢迎您创建该词条,阐述对202304的理解,并与今后在此搜索202304的朋友们分享。
创建词条
关于我们 -
广告服务 -
企业会员服务 -
网站地图 -
联系我们 -
征稿 -
友情链接 -
手机EEPW
Copyright ©2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《电子产品世界》杂志社 版权所有 北京东晓国际技术信息咨询有限公司

京ICP备12027778号-2 北京市公安局备案:1101082052 京公网安备11010802012473