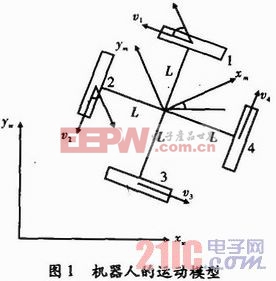
- 摘要 通过对足球机器人运动学模型的分析,考虑到系统的时变、非线性和干扰大等特点,以全向移动机器人为研究平台,提出一种将模糊控制与传统的PID控制相结合的方法,应用到足球机器人的运动控制系统中。针对足球机器
- 关键字:
机器人 运动 控制 移动 全方位 模糊 PID 基于
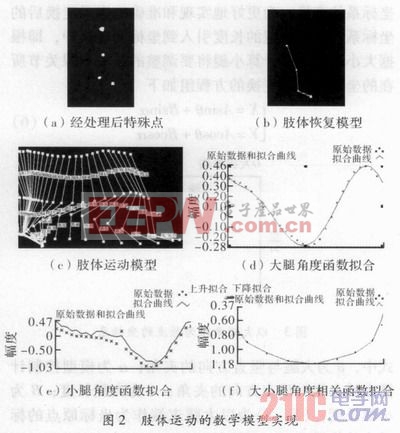
- 摘要 为满足人体关节运动模型研究的需要,设计了一种基于机器视觉的肢体运动模式采集系统,系统由PCI-1411视频采集卡和LabVIEW数字图像处理平台构成。通过对采集到的肢体运动状态视频分帧进行处理,建立了肢体关节运
- 关键字:
运动 模型 肢体 系统 视频 采集 基于
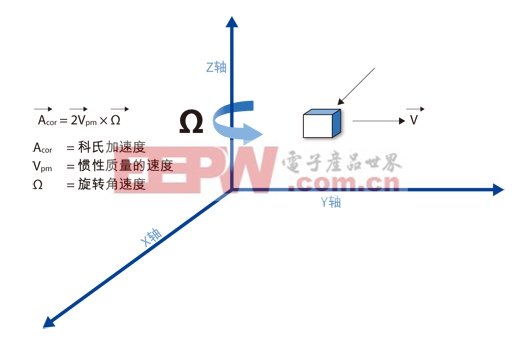
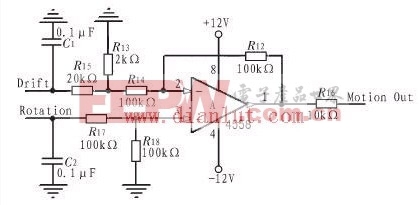
- 对设备在三维空间中的运动进行测量及智能处理的运动处理技术,将是下一个重大的革命性技术,会对未来的手持消费电子设备、人机接口、及导航和控制产生重大影响。
这场变革的推动力量是基于微机电系统(MEMS)的消费级
- 关键字:
消费 电子 影响 对消 方案 运动 处理 MEMS
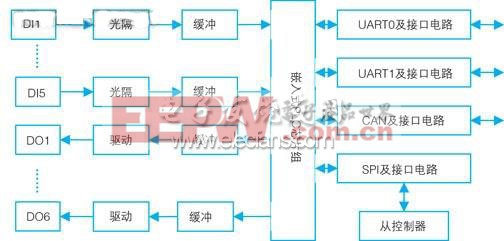
- 1 引言 本文作者利用黄石市科威自控有限公司的嵌入式plc芯片组,设计出了kp3-05m06r型运动控制器。该控制器集plc、can总线、rs485/232等功能于一体,与步进驱动器或伺服驱动器配套使用,具有对步进电机或伺服电机
- 关键字:
运动 控制器 kp3-05m06r 实现 PLC 芯片组 嵌入式
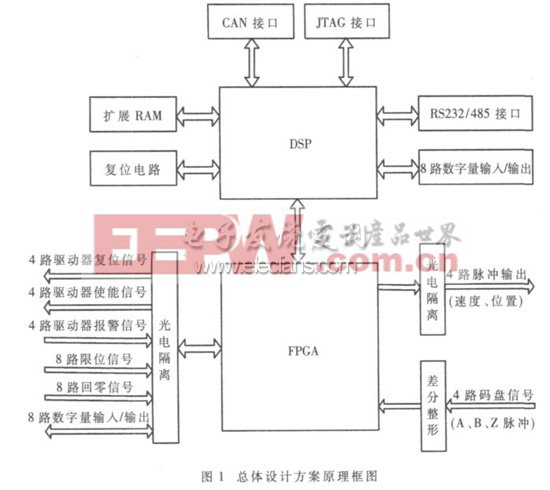
- 一种嵌入式运动控制器的实现,本文选用DSP与FPGA作为运动控制器的核心部件,设计了通用型运动控制器。其中DSP用于运动轨迹规划、速度控制及位置控制等功能;FPGA完成运动控制器的精插补功能,用于精确计算步进电机或伺服驱动元件的控制脉冲,同时接
- 关键字:
实现 控制器 运动 嵌入式
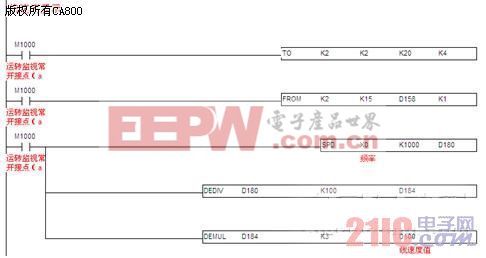
- 摘 要:本文在阐述轧辊机工作原理、工艺要求的基础上,主要介绍台达DVP-20PM00D运动控制器在轧辊机上面的应用与相关控制程序概要。 关键词:运动控制器 伺服控制 高速脉冲1 引言 移动电子市场造就出包括镍氢电池、
- 关键字:
电池 轧辊 控制器 运动 台达 20PM 基于
- 本项目的目的是为了仅利用眼球运动控制任天堂游戏机。因此,需要使用称之为眼动电图描记法(EOG)的技术读取眼睛位置,并且通过与NES标准协议接口,模拟游戏控制器。为了实现这两个任务要求的多样性,选择National
- 关键字:
控制 电子游戏 运动 眼球 利用 eyeMario
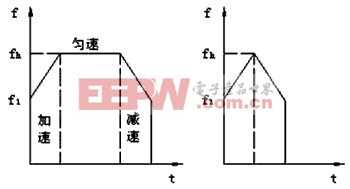
- 步进电机区别于其他控制用途电机的最大特点是,它可接受数字控制信号(电脉冲信号)并转化成与之相对应的角位移或直线位移,因而本身就是一个完成数字模拟转化的执行元件。而且它能进行开环位置控制,输入一个脉冲信号
- 关键字:
运动 规律 控制 速度 电机 步进
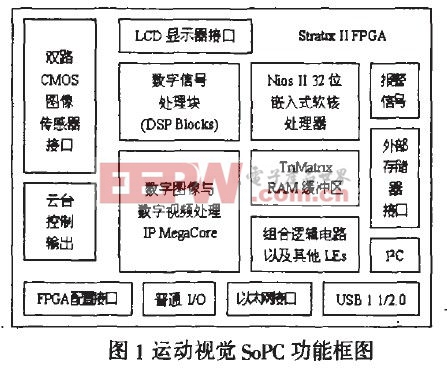
- SoPC是 SoC和 FPGA结合的产物,由单个可编程重构的芯片完成整个系统的主要功能。SoPC设计灵活多变,可以用原理图,硬件描述语言甚至是 C/C++高级语言进行设计;同时还具有可重构、可裁减、可扩充等特点,升级方便。 SoPC兼备 SoC和 FPGA二者的优点
- 关键字:
理系 设计 实现 处理 视觉 SOPC 运动 基于
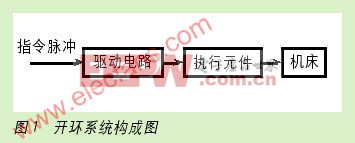
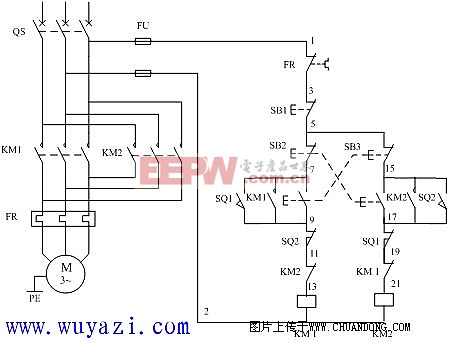
- 一.机电一体化及其机床电气控制技术的发展概况机电一体化技术是随着科学技术不断发展,生产工艺不断提出新要求而迅速发展的。在控制方法上主要是从手动到自动;在控制功能上,是从简单到复杂;在操作上,是由笨重到轻
- 关键字:
原理 应用 数控加工 控制系统 运动 伺服
- 引言
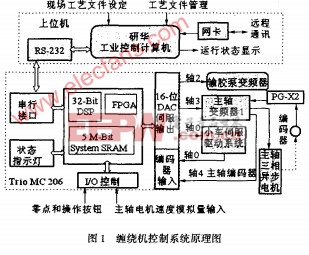
本文研制的缠绕机为卧式, 芯模水平放置。缠绕时, 芯模绕其主轴匀速转动, 小车电机拖动小车沿芯模轴向往复运动, 带动绕丝嘴按一定缠绕角度完成纤维在芯模上的缠绕铺放, 达到制品的技术要求。
模块
- 关键字:
缠绕 数控系统 开放式 控制器 运动 基于
- 一、引言
当前,各种运动控制卡的二次开发的比较复杂。目前国内比较多的工程师都熟悉数控系统的G代码,在ARM 32位单片机和国产运动控制芯片AFD-X05的基础上,研制成的可执行G代码的五轴联动运动控制器,使得二次开发
- 关键字:
联动 数控系统 应用 开放式 AFDX05 运动 控制 芯片 基于
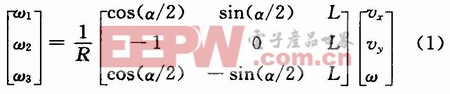
- 以RoboCup中型组足球机器人为实验平台,提出一种基于FPGA的全方位移动足球机器人运动控制系统的实现方法。首先分析和研究三轮全方位移动机器人的运动学特性,建立其运动控制模型,然后以FPGA为主要处理器,设计了PID速度闭环控制算法,实现了对机器人的精确控制。实验发现,该设计方法具有很好的实时性,能够对全方位移动机器人进行快速、准确的控制。
- 关键字:
FPGA 设计 控制系统 运动 机器人 中型
- SOPC的运动视觉处理系统, (1) Nios II嵌入式处理器 Nios II嵌入式处理器是一款通用的 RISC结构的 CPU,它定位于广泛的嵌入式应用。在 Nios II IDE集成开发环境中,按照操作提示添加、设置相关参数,在几分钟之内就能生成一个 Nios II嵌入式
- 关键字:
理系 处理 视觉 运动 SOPC
- 本文提出一种以PMAC2 PC - 104运动控制器作为控制器的AGV底盘控制系统, 采用PMAC作为控制器使多轴控制变得更简单, 控制系统更具开放性且实时性强。
1 AGV系统硬件构成 PMAC ( Programmable Multi-A
- 关键字:
AGV 底盘 控制系统 控制器 运动 PMAC2 PC 基于
运动介绍
您好,目前还没有人创建词条运动!
欢迎您创建该词条,阐述对运动的理解,并与今后在此搜索运动的朋友们分享。
创建词条
关于我们 -
广告服务 -
企业会员服务 -
网站地图 -
联系我们 -
征稿 -
友情链接 -
手机EEPW
Copyright ©2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《电子产品世界》杂志社 版权所有 北京东晓国际技术信息咨询有限公司

京ICP备12027778号-2 北京市公安局备案:1101082052 京公网安备11010802012473