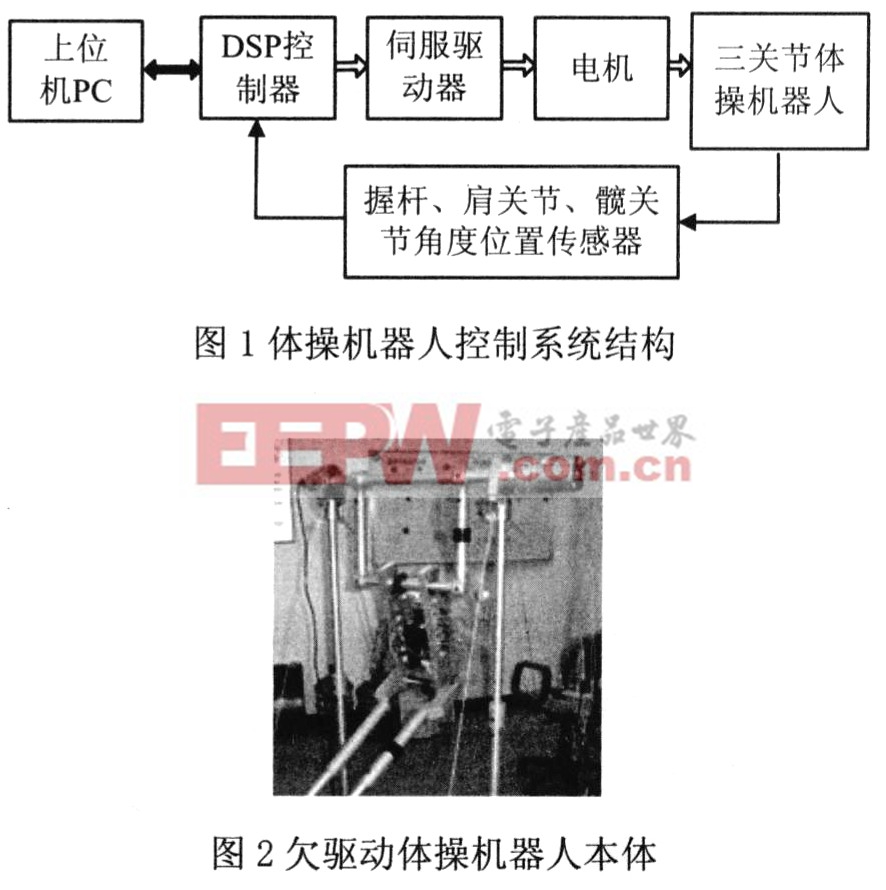
- 针对欠驱动机器人控制系统,给出一种基于DSP控制的类人形的三关节欠驱动体操机器人。首先以ADSP218l为核心设计出控制器,通过高速PCI总线与上位机PC通讯,采用直流电机伺服控制。然后依据建立的体操机器人动力学模型提出基于能量增加的正弦和斜坡函数输入方式,经对体操机器人作摇起控制实验,实验显示,设计的三关节欠驱动体操机器人控制系统满足实时性、稳定性和准确性要求。
- 关键字:
控制 设计 机器人 体操 DSP 驱动 基于 驱动器
- 新华网哈尔滨12月25日电(记者颜秉光)哈尔滨工业大学25日说,由10名教师和学生组成的一个研发小组,成功研制出能表演广播体操的智能机器人。 这个智能机器人身高31厘米、体重1.6公斤,名叫“小萝卜头”,能在乐曲声中熟练地做伸展手臂、下蹲、转身等动作。 小萝卜头拥有16个提供能量的电机、16个能活动的自由度,身后安装一块控制板,其中蓝牙控制线能够接收电脑传来的蓝牙指令,电脑中事先存储设定了音乐、指令等,指挥机器人跳舞、做广播体操等。 小萝卜头的设计者之一、哈尔滨工业大
- 关键字:
高校 表演 体操 智能 机器人
体操介绍
您好,目前还没有人创建词条体操!
欢迎您创建该词条,阐述对体操的理解,并与今后在此搜索体操的朋友们分享。
创建词条
关于我们 -
广告服务 -
企业会员服务 -
网站地图 -
联系我们 -
征稿 -
友情链接 -
手机EEPW
Copyright ©2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《电子产品世界》杂志社 版权所有 北京东晓国际技术信息咨询有限公司

京ICP备12027778号-2 北京市公安局备案:1101082052 京公网安备11010802012473