基于声光探测的汽车定位系统设计
2.4 红外抗干扰处理
由于定位装置在室外场地工作,在电路设计上应考虑对日光等背景红外线的抗干扰措施。具体采取了3项措施:
(1)封闭接收头。将接收头置于带窗口箱体中,避免日光对其直接照射。
(2)动态红外线发射。日光等背景红外线一般不会有巨烈波动,因此,对红外线进行脉冲调制,以动态红外线发射效果较好。
(3)选用抗干扰接收头。电路采用了抗干扰能直射日光红外线干扰中有效检出红外线信号。为达到SBXl6i0—02接收头最佳工作点,脉冲发生器产生的振荡信号频率应在(38±0.5)kHz之间。
2.5 大跨度电子移位电路开关信号丢失处理
电子移位电路通常由约100片74LSl64串联组成,电路长达数10 m,由于分布参数的影响,造成各片74LSl64的移位时钟信号CLK的不同步,极易导致开关信号在移位过程中丢失,使扫描“半途而废”。为此,对各片74LSl64的移位时钟信号CLK,应采用并联驱动,并保证各片74LSl64的时钟信号处于同一个驱动级上,同时尽量减小电路阻抗,提高驱动电路的功率。
3 测距系统电路设计和调试
图3为测距系统电路。该电路由1个单片机和4组超声波收发单元组成,图中只画出了一组超声波收发单元。发射单元由40 kHz振荡器和门电路构成。门电路产生占空比很小的低频脉冲信号,脉冲持续时间为160 its,脉冲间隔为30~50 ms(视需要调整)。此脉冲信号一路作为振荡器的置位脉冲;另一路送给单片机,作为计时器的起始脉冲。在置位期间,振荡器输出经调制的频率为40 kHz的脉冲信号,由超声波发射头T40-16发射出去。回波的接收采用通用的FPS409I红外接收组件,只是需要把红外接收管PH302换为超声波接收头R40—16,这样在有效的测距范围,可保证接收到的信号其输出达到TTL电平。接收信号经整形放大后送入单片机,作为计时器的停止脉冲。单片机计算起始脉冲至停止脉冲之间的时间t,按照式(1)求出距离s。
图3 测距系统电路
测距系统采用了“一拖四”的结构,为避免多组超声波单元互相干扰,它们应在单片机控制下轮流工作。该电路中脉冲间隔为30~50 ms,对应测距范围约为5~15 m,如果测距范围加大,需要增大脉冲间隔。另外,该测距电路存在约30 cm的测距盲区,测距装置与测量对象间要保持30 cm以上的距离,同时单片机对起停脉冲计时时,也要避开盲区内虚假停止脉冲的干扰。
4 控制软件设计
控制软件包括主机软件和单片机软件,主要软件流程如图4所示。单片机1产生红外线电子移位逐行扫描电路所需的开关信号和移位时钟,并在每个移位时钟周期采集一次接收状态数据,完成一遍扫描后把数据上传给主机;还可根据主机指令,通过程序控制改变扫描速度和扫描强度。单片机2分别控制检测4个超声波装置,所计时间经简单处理后上传给主机。由于存在盲区,要避开此区间过来的虚假停止脉冲的干扰,采用延时开中断,即在起始脉冲启动计时器计时后,等待盲区过去再开中断,使单片机中断口接收到实际有效停止脉冲停止计时器计时。主机程序以主动查询方式轮流从两个单片机读取纵向检测数据和横向检测数据,然后依照一定算法,对检测数据进行处理、分析,先判断是否有车,有车时判断车型、计算停车位置参数和车箱几何参数。
主机软件采用Delphi编写,能进行测量参数显示和工作参数设置。
图4 主要软件流程
5 测试与结果
测试在室外工业现场进行。工作区为5 m×21 ITI,红外模块的间距为5 cm,红外收发阵列的模块数均为425。连续对100辆汽车进行定位,包括多种车型,都定位成功。在白天和夜间各抽取5辆汽车的定位数据与实物数据进行现场比对,结果如表1所示。车箱长度和前距测量误差不超过5 cm,车箱宽度和边距测量误差不超过6 cln,单次定位时间最快可达1 s内。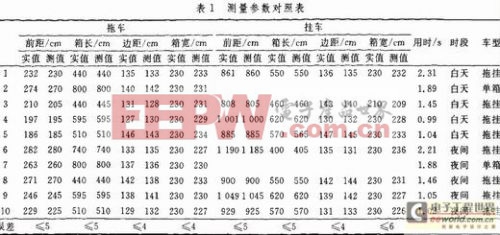
6 结语
结果表明,采用声光探测技术可实现平面内物体的非接触定位。基于声光探测的汽车定位系统,不论是定位速度、定位精度还是定位可靠性,都较当前的其他定位方式有明显的提高。目前该系统已被用于汽车物料自动取样控制系统中,在多个钢铁电力企业得到应用,运行效果良好。




评论