探索80C51的三种非常规的复位技术
标准80C51片内现有的复位逻辑比较简单,只有通过一条复位引脚RST进行外部扩展。技术手册中给出了上电复位(POR,power on reset)和人工复位(MRST,manual reset)电路的接线方法;借助于一只专用外围芯片,如MAX813L或DS1323等,来扩充欠压复位(LVR,low voltage reset)和看门狗复位(WDR,watch dog timer reset)也有文章介绍。
本文将介绍三种非常规扩展复位方式:软件复位(SWR,software reset)、软硬件复位(SHR,software and hardware reset)和非法地址复位(IAR,illegal address reset)。
软件陷阱技术及其改良方法
软件陷阱(software trap)是一种捕捉程序“跑飞”的编程方法。通常可以在程序中设置软件陷阱,引导程序失控的单片机跳转到一个指定的地址去执行,最终回复到正常轨道上来。软件陷阱可以设置在用户程序的空隙处或者转移指令之后,还可以利用一系列的陷阱指令来填充程序存储器的空白区。实现软件陷阱功能的指令是一个“5字节指令串”,通常包含2条单字节NOP指令和1条3字节跳转指令。
NOP;利用空操作指令
NOP;来增加捕捉有效性
LJMPSWRST;无条件跳转到指定地址去
其中“SWRST”可以是一段“软件复位程序”的入口地址标号,也可以是复位矢量“0000H”,即主程序入口地址。
如果SWRST等于复位矢量0000H,则会把捕捉到的跑飞程序引导到初始化程序入口地址去执行,从而达到回复到正常轨道的目的。这种处理方法只适合中断功能没有被启用的场合。可以设想,假如是在(低级或高级)中断服务程序中跑飞的,这时即使把程序拉回到起点,而中断激活触发器不能够被清除,会影响以后的中断请求无法被 CPU响应。
如果SWRST等于“软件复位程序”的入口地址,则会引发一次“软件复位”。关于软件复位程序的设计方法,随后介绍。
总之,这种方法的指导思想是指,把未使用的ROM空间用跳转引导指令填满,作为软件“陷阱”,以捕获“飞掉”的程序,并强行将捕获到的跑飞程序引向一个特定的地址,在那里由一段专门处理错误的程序进行处理,以恢复系统的正常运行。为提高跑飞程序的捕获率,通常还要在引导指令之前放置上几条空操作指令 NOP。理由是,8051的指令编码采用的是不等长方式,长度分别为1~3字节,而程序跑飞又是通过非法随机改变PC值形成的。假若跑飞后的PC值落到3 字节指令LJMP的中间,就会把操作数当作操作码来执行,将会产生不可预知的结果。为了提高捕捉的有效性,就在LJMP指令之前至少填充2条单字节的 NOP指令。
如果把“5字节指令串”改换成如下作者新设计的“4字节指令串”,陷阱指令将会更加有效。理由是,该指令对应的目标码为“00 20 00 20H”,这段码无论重复多少次都是等同的。另外,应该在程序存储器0020H开始的3字节中再放置一条跳转到“软件复位程序”真正入口的中转指令 LJMP SWRST。经过核查,0020H~0022H字节恰好位于定时器T1中断矢量区尾部和串口中断矢量之前。
SWRST0 EQU 0020H;定义“软件复位程序”的间接入口地址为“0020H”
NOP;填充一条单字节的空操作指令,机器码是“00H”
LJMP SWRST0;无条件跳转到指定地址去。对应的机器码是“20 00 20H”
软件复位技术
软件复位是一种新技术,目前有越来越多的新型单片机配备了该功能。例如Philips公司的P87LPC700和P89LPC900系列、TI- BB公司的MSC1200系列和SunPlus公司的SPMC65系列等,内部都设计了专门用于实现软件复位的控制寄存器或者控制位。
软件复位是在利用软件陷阱技术或软件看门狗技术时,必需配套实施的一项后续处理工作。所谓“软件复位”是一种由用户软件控制的复位活动,就是利用一系列指令来模拟硬件复位所实现的各种操作内容,并且重新从头开始执行用户程序。
其中的操作内容应该包含:(1)对于标准80C51的21个特殊功能寄存器SFR的复位操作,利用MOV指令很容易实现。全部复位可能不是必需的,只管那些在用户程序中用到的SFR即可,可以由用户自己定制。
2)对于无统一编址的程序计时器PC的复位,利用一条跳转指令即可。(3)中断激活触发器的复位既容易被人们忽略,也不容易实现。理由是它们对于用户程序是不可见的,无法直接读写其内容。有的编程人员采用LJMP 0000H(机器码为20 00 00H)作为软件陷阱,认为直接跳转到复位矢量就完成了软件复位,就是这类失误案例的典型代表。
清除中断激活触发器有何必要呢?程序的跑飞是随机发生的,其起飞点完全可能发生在低级或高级中断服务子程序中,这时的中断激活触发器已经被置位。如果在程序回复之后没有及时清除它们,将阻止以后出现的所有的同级或低级中断请求。
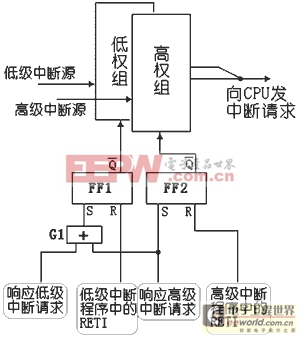
图1 中断激活触发器示意图
中断激活触发器包含高权组和低权组两个触发器,电路组成如图1所示,该图是根据作者的理解和经验绘制的。电路中包括1个逻辑或门G1、两个S-R触发器FF1和FF2。当CPU响应低级中断请求之后,FF1被置位,其Q = 0,封锁“低权组”不再受理新的低级中断请求;当CPU响应高级中断请求之后,因为G1的作用而使FF1和FF2同时被置位,FF1的Q = 0封锁“低权组”,FF2的Q = 0封锁“高权组”,不再受理新的高级和低级中断请求。
如何设计“软件复位程序”呢?其编写方法如下。
SWRST:;定义软件复位程序的实际入口地址
CLR EA;首先关闭中断源总使能位
SETBF0;设置一个软件复位标志位
MOVP0,#0FFH;设定通用端口P0为高阻输入状态
MOVP1,#0FFH;设定通用端口P1为高阻输入状态
MOVP2,#0FFH;设定通用端口P2为高阻输入状态
MOVP3,#0FFH;设定通用端口P3为高阻输入状态
MOVPSW,#00H;设定程序状态字寄存器为原始值
……;(据实际需要还可初始化其他SFR)
MOVDPTR,#SWR0;为RETI准备弹出地址,而又不想改变执行顺序
PUSHDPL;压栈低字节,在先
PUSHDPH;压栈高字节,在后
RETI;中断返回指令,清除高级中断激活触发器
SWR0:CLRA;准备复位地址
PUSHACC;压栈低字节00H
PUSHACC;压栈高字节00H
RETI;清除低级中断激活触发器,并跳到0000H
以下几点需要说明:(1)首先关闭总的中断使能位,以确保软件复位过程顺利完成;(2)其中的核心指令是中断返回指令RETI,因为在整个指令集中只有该指令能够清除中断激活触发器;(3)末尾RETI指令的作用还代替了一条3字节的“LJMP 0000H”指令;(4)由软件陷阱捕获的跑飞程序并不一定同时置位了所有两个中断激活触发器,但是该程序仍然适用,并且也没有任何负面影响;(5)软件复位标志这里利用了PSW中的一个通用位F0,也可以利用F1、GF0、GF1以及RAM字节单元或位单元等;(6)软件复位是一种不外扩任何硬件电路、不导致单片机发生状态迁移、纯软件的复位方法。
软硬件复位技术
软硬件复位是软件复位功能的一种延伸,也是单片机的一种自主复位方式,既具有软件复位的特点(可以由编程人员按需要来启用),又具有硬件复位的特点(能够实现硬件复位的全部操作内容)。这种复位方式是本文作者自行规划、设计和命名的。
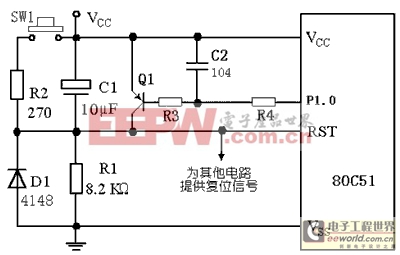
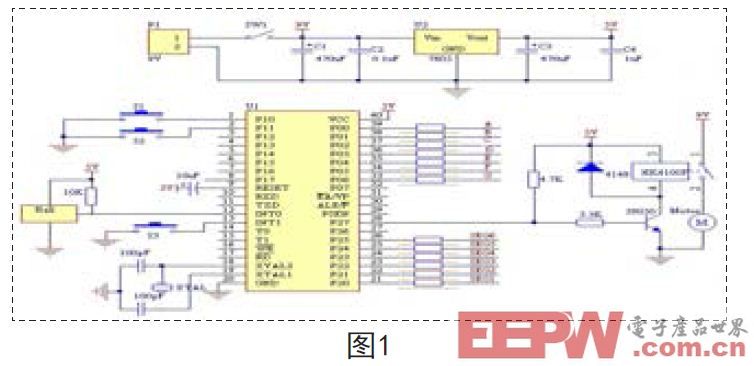
(a)分立件电路方式
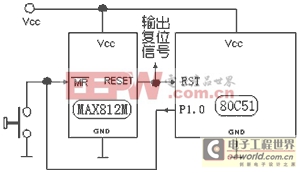
(b)IC电路方式
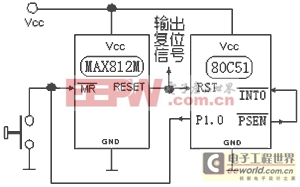
在上述软件复位的基础上很容易实现这里所说的软硬件复位方式,不过需要外扩一定的硬件电路的支持。图2是两种配合软硬件复位的外扩电路。其中,图2 (a)电路是在普通复位电路的基础上,添加1只三极管Q1和3只阻容元件而成的,并且其导通与截止由一条并口引脚控制,如P1.0。平时P1.0维持高电平,Q1截止;当内部软件需要实施该复位时,从P1.0脚输出低电平,Q1导通把RST脚拉高,强行复位单片机。这里R3、R4和C2起着延时和限流的双重作用。图2(b)电路是在MAX812M对接80C51电路基础上添加一条连线而成的,其工作原理与上类似。该连线把MAX812M的人工复位输入脚 MR和一条通用I/O脚(如P1.0)连接起来即可。
如何设计“软硬件复位程序”呢?其编写方法如下。
SHRST:;定义软硬件复位程序的入口地址
SETF1;设置一个软件复位标志位
CLRP1.0;从P1.0输出低电平,开始实施软硬件复位
ORL PCON,#02H;置位PD,令单片机进入停机状态,即PD模式
;经过延时后RST被拉高,迫使单片机进入复位状态
;在复位操作完成并且唤醒单片机之后,将重新从0000H开始执行用户程序
以下几点需要说明:(1)如果利用这里的“软硬件复位程序”代替前面的“软件复位程序”,可以简化用户程序并且复位进行得彻底,但是需要增加一些硬件,并且也把可以定制的复位操作给转化成了固定的复位操作。(2)在图2所示的软硬件复位的支撑电路,除了可以提供复位信号给单片机,还有一个很大的好处,就是可以为其他外围电路提供复位信号,这弥补了传统80C51的一个欠缺。
标准80C51的复位引脚RST是只能输入的单向结构,不能由单片机主动地为外围芯片提供同步的复位信号;而MC68HC05和MC68HC08系列、ST公司的ST7系列,以及许多新款51兼容单片机都把RST引脚设计为可输入/输出的双向结构,在内部看门狗溢出复位的同时,也从RST输出一个高电平脉冲,控制其他外围芯片与单片机进行同步复位操作。例如,ATMEL公司的AT89S51/52、T89C51RD2、AT89C51RC等型号和 Philips公司的P89C51RC、P89C51RA2/RB2/RD2等型号,它们都带有内部看门狗。
非法地址复位技术
一般来说,非法地址复位是指由于意外原因导致程序计时器PC内容被破坏,而迫使CPU试图到一个非法地址去抓取指令代码来执行,就强迫单片机进行复位操作。
由于51系列单片机的硬件结构采用的是“哈佛架构”,其程序区和数据区截然分开、独立编址,不存在CPU到RAM区抓取指令的可能性,因此这极大地降低了非法寻址的概率。但是这并不能彻底杜绝非法寻址的可能性,尤其是对于哪些实际配备ROM容量远小于64Kb的情况。这时就可以狭义地定义非法地址是 PC值超出ROM实际容量的地址编码。
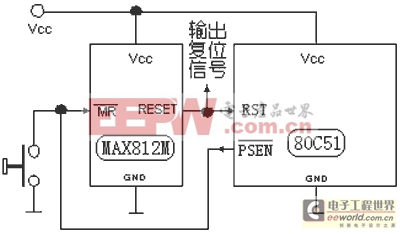
(a)IC电路直接复位方式
(b)先中断后复位方式
图3是两种实现非法地址复位的支撑电路。其中,图3(a)电路是在图2(b)的基础上改变一条连线而成的。该连线一端连接PSEN信号引脚,该引脚专门用来提供选通外扩程序存储器ROM的片选信号;另一端连接MAX812M的人工复位输入脚MR。平时PSEN引脚一直维持在高电平上;只有当CPU试图非法到外部ROM抓取指令时,PSEN引脚才会送出低电平脉冲,就是巧妙地利用该脉冲作为复位信号源,来强迫单片机进行复位操作。图3(b)电路可以看作是在图2(b)基础上改变添加一条连线而成的。该连线把PSEN信号引脚和一条外部中断源引脚INT0连接起来,并且设定INT0为下降沿触发和高级中断源。当出现非法地址时,PSEN引脚上的低电平脉冲经过INT0向CPU请求中断;在CPU响应该中断之后可以设置标志,然后实施软件复位或者软硬件复位。


需要提示一点:非法地址复位方式的启用是有前提条件的,它仅适用于那些纯粹利用片上ROM(指程序存储器),即无外扩ROM,并且片上ROM不足64Kb的情况。
复位方式小结
标准80C51只有一个外接复位源引脚RST,基本所有硬件中断都是通过RST脚引入的,并且是根据实际需要逐个进行扩充的。其中只有上电复位POR是什么场合下都必不可少的。其扩充顺序大致符合(不是绝对符合)表1中的规律。
在此对于可能用到的多种复位源和复位的方式,进行如下几种不同的分类。
1 传统复位方式和非传统复位方式
传统复位方式(包含上电复位和人工复位)是80C51技术手册和所有教科书中几乎都提及的;而非传统复位方式(包含欠压复位、看门狗复位、软件复位、软硬件复位和非法地址复位)是为了满足技术发展的需要而扩充的,这也是一些新款单片机在片内新增的几种复位方式。
2 硬件复位、软件复位和软硬件复位
复位分类如表2所示,将除了软件复位之外的所有复位方式外部都引入到RST复位引脚上。
3 电源电压监控复位和程序运行监控复位
电源电压监控复位包含上电复位和欠压复位,它们都是在电源电压的非常时期实施的复位;程序运行监控复位包含人工复位、看门狗复位、非法地址复位、软件复位和软硬件复位,它们都是在用户程序失常的情况下实施的复位。
4 内部复位和外部复位
内部复位包含看门狗复位、软件复位、软硬件复位和非法地址复位,它们基本都由内部原因导致的复位;外部复位包含上电复位、人工复位和欠压复位,它们基本都由外部原因导致的复位。
5 快速复位和延时复位
前者希望复位操作越快越好,例如人工复位、看门狗复位、非法地址复位等;而后者则希望复位操作有一个延迟时间,例如上电复位、欠压复位等。
6 冷复位和热复位
只有上电复位属于冷复位,其余均属于热复位。在冷复位实施之前单片机处于无电状态。
矢量控制相关文章:矢量控制原理


评论