嵌入式电镦智能控制设计
3 电镦机控制特性分析
3.1 电镦常见缺陷
气门毛坯成型过程中,由于各方面的参数影响,会出现不同类型的废品,主要缺陷有:头部有裂纹、顶部出现折叠、成型歪斜不均匀。
当毛坯成形时棒料过热、变形量大,在附加拉应力的作用下产生轴向裂纹。折叠产生原因是始镦温度与终镦温度相差较大,金属*结合不好,有明显的分界线,形成台阶状的折叠。而成型歪斜是由于砧子块棒料接触电阻相差悬殊,造成两边电流不均匀,棒料过多地流向温度高的一侧,引起歪斜。
从上面分析可见,常见缺陷成因主要可以归结为:压力不稳定,电流不均匀,驱动系统有时滞性。
3.2 气液结合驱动
电镦机振动本身是复杂的非线性系统,无法获得精确的数值解,为建立电镦机的振动力学模型,在此做如下假设:
(1)将电镦机机身、工件、砧子缸看作刚性质量块;忽略电镦机连接及驱动部件之间的间隙对电镦机振动的影响。
(2)将电镦机机身及镦粗缸等效为线性弹簧。
(3)只考虑电镦机纵向方向的振动。
由工程振动理论知:振动系统受到激励发生的振动,是由有阻尼自由振动与稳态振动组成的。如图3所示为电镦机等效弹簧一质量系统简图,k为弹簧刚度,c为粘性阻尼系数,F为一阶跃激励,所谓阶跃激励就是受到常力F的突然作用,即F(t)=F。

系统的运动微分方程为:
阻尼比ξ的大小可以用来表示振幅衰减的快慢,阻尼比越大,振幅的衰减越快;阻尼比越小,则超调量越大。由于液压缸弹簧刚度k值远大于气缸k值,故液压缸系统阻尼比小于气缸系统阻尼比,可以判断在同样阶跃激励作用下,液压系统振动更厉害。
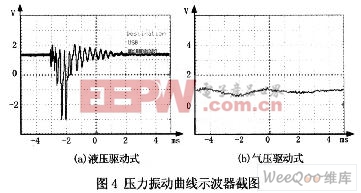
在嵌入式智能电镦机上,选择了气液结合驱动。气液联合驱动是指以压缩空气为动力源,通过气液转换元件将气体动力转换成液体动力的驱动方式。在本系统中,采用气液联动驱动砧子块,镦粗缸采用直接气体动力驱动。图4是在镦粗缸换向时,压力传感器测得的压力振动曲线示波器截图。液压驱动式镦粗缸振动幅值比气体驱动大25倍,振荡次数超过10次。实验证明,气液结合驱动系统压力稳定性好。
4 模糊自整定PID控制策略
电镦控制系统属于非线性时滞系统,涉及温度、压力、电流等参数的控制。用常规的PID控制器,难以达到较好的效果。模糊PID是将模糊控制与经典PID控制相结合的控制器,适用毛非线性、数学模型不确定的系统。
模糊自整定PID是在PID算法的基础上,通过计算当前系统误差e和误差变化ec,利用模糊规则进行模糊推理,查询模糊矩阵表进行参数调整。模糊控制设计的核心问题是总结设计人员的技术知识和实际操作经验,建立合适的模糊规则表,得到针对kD、ki、kd三个参数分别整定的模糊控制表。kp、ki、kd的模糊规则表建立后,再应用模糊合成推理设计PID参数的模糊矩阵表,查出修正参数带入下式计算:

在线运行过程中,控制系统通过对模糊逻辑规则的结果处理、查表和运算,完成对PID参数在线自校正。


评论