基于ARM-Linux的自主避障机器鱼设计
1 硬件系统设计
1.1 工作原理
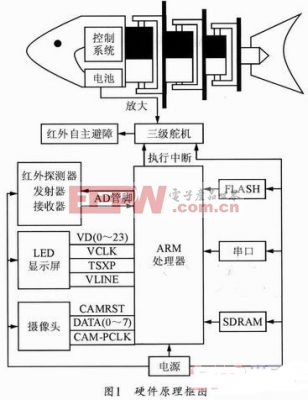
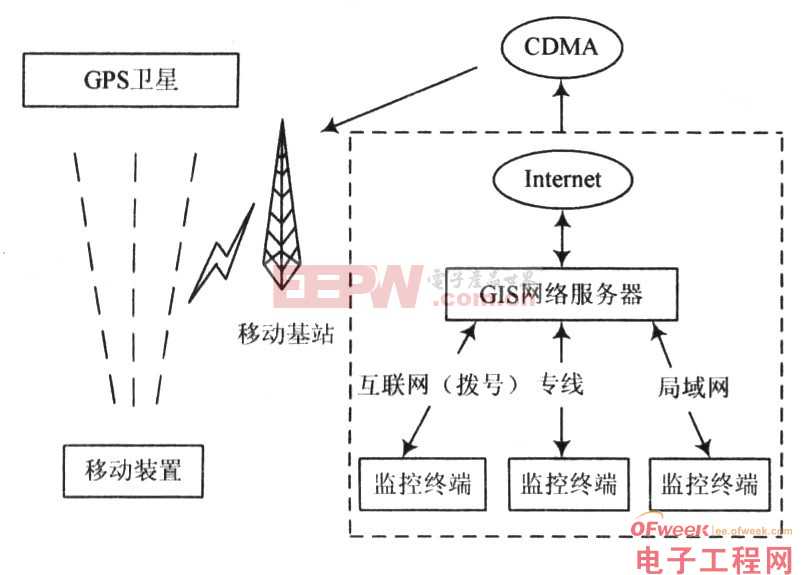
机器鱼主硬件原理如图1所示。机器鱼的自主避障功能是通过以ARM芯片、LINUX嵌入式系统、红外传感器等结合实现的。机器鱼在水中分别通过摄像头、红外传感器、LCD进行画面采集、自主避障和画而显示。摄像头采集到图片后,图像被缓存于SDRAM中。ARM芯片通过红外传感器的AD管脚向发射器传送命令,使探测器的发射模块不断地向外发送红外线,当接收器接收到返回的红外线后会立刻通过AD管脚向ARM芯片传送与红外线返回的光强相应的电压,电压经过ARM芯片的A/D转换器转变成十位的二进制数字量,通过一定的公式计算出此时与障碍物的距离。当计算出来的距离小于预设量时,ARM芯片的控制软件执行一个串行中断指令改变脉冲的脉宽即改变改PWM波的占空比变,进而改变机器鱼的游向从而避开障碍物。
1.2 ARM芯片模块设计
ARM处理器拥有16/32Bit内核和具有450MIPS运算能力。400MHz的标准工作频率可满足高速的应用要求。ARM主芯片有内置数字摄像头接口,可选配130万像素CMOS号业摄像头进行图像采集。ARM处理器的外围扩展了64M的SDRAM和FLASH,ARM主芯片支持Linux、uCOS-II、WINCE等操作系统。ARM芯片高度集成,主芯片拥有CPU、Nand flash、Nor flash、Ethernet controller等资源。CPU内的所有可用资源可通过200pin引脚引出。接口核心板可以单独构成系统,无需外围器件。
嵌入式Linux (Embedded Linux)是指对标准Linux经过小型化裁剪处理之后,能够固化在容量只有几KB或者几MB字节的存储器芯片或单片机中。它具有成本低、源代码开放和移植性好的优点。在工程中得到了广泛的应用,适合于特定嵌入式的应用场合。
1.3 红外模块
红外线是介于可见光和微波之间的一种电磁波。它兼具可见光折射、反射、直线传播以及微波的贯穿一些不透明物质和较强的穿透的能力。红外传感器包括红外发射模块和红外接收模块。科学实验表明温度高于绝对零度的任何物体均可产生红外辐射,因此红外传感器要有更强的发射红外的能力。
距离探测器的类型主要有激光探测器、视觉探测器、超声波传感器和红外传感器。由于激光探测器和视觉探测器比较昂贵而且对控制器的要求很高,所以不选为机器鱼的避障器。超声波传感器测距范围一般在30~300 cm,可见短距离测距是超声波传感器的盲区。能“看”到几米之外障碍物对于机器鱼的意义并不大,而红外传感器的测距距离一般在几十厘米之内,因此我们选择红外传感器作为机器鱼的避障器。
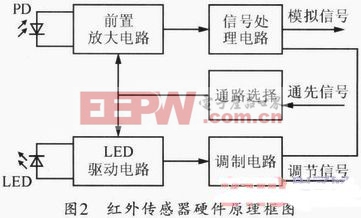
GP2YOA21YK0F是夏普的一款距离测量传感器。它由PSD(position sensitive detector)、IRFD(infrared emitting diode)以及信号处理电路三部分组成。由于采用了三角测量方法,所以被测环境温度、物体的材质以及测量时间均不会影响传感器的测量结果的精确度。接收到反射回来的红外线后,传感器输出一个与返回光强成正比模拟电压。输出的模拟电压经过ARM的A/D转换器变成数字量,数字量传到MCU后以一定的算法计算出机器鱼与障碍物之间的距离。将探测的结果与预设值比较,若大于预设值则不执行中断即继续前进,否则执行中断进行避障。红外传感器硬件原理如图2所示。
1.4 摄像头模块
为机器鱼配备的摄像头是CMOS数字图象传感器。采用的是Ommvision公司的OV9650,OV9650具有130万的像素、10Bit的数据接口与标准SCCB接口,其分辨率达1280x1024并采用CSP-28封装该摄像头用类似于IIc总线的Secb总线连接到ARM主芯片的IIc接口进行通信。在ARM芯片中,摄像头的接口控制模块(CAMIF)由图像采集模块、视频预览尺度模块、模式混合模块、特殊功能寄存器(SFR)模块、码流尺度模块、视频预览DMA模块以及码流DMA模块构成。COMS摄像头OV9650输出的ITU-656格式视频码流,经CAMIF处理后,将采集到的视频码流成两路不同的格式进行传输,两路格式不同的信号分别进入不同的帧存储单元进行存贮,之后根据ARM控制器的指令通过视频DMA通道进行传输。摄像头原理如图3所示。
1.5 LCD模块
LCD液品显示器是(Liquid Crystal Display)的简称,LCD的构造是在两片平行的玻璃当中放置液态的晶体,两片玻璃中间有许多垂直和水平的细小电线,透过通电与否来控制杆状水晶分子改变方向,将光线折射出来产生画面。LCD有扭转式向列型(Super Twisted Nematic,简称STN)和薄膜式晶体管型(Thin Film Transistor,简称TFT)两种主流类型。因为TFT有反应速度快、可视角度大、色彩丰富、分辨率高、对比度、亮度高等优点,所以我们选择TFT的LCD。LCD硬件原理、LCD控制器功能如图4所示。
LCD的工作受其控制器控制完成,图5为LCD控制器功能图。通过LCD控制器的寄存器组REGBANK来对LCD控制器的各项参数进行设置。而LCDCDMA则是LCD控制器专用的DMA通道,负责将视频数据从显存(显存是SDRAM中的一块区域,可利用REGBANK编程设定)中取出,并从VIDPRCS从VD[23:0]发送给LCD屏。同时LPC3600和TIMECEN负责产生LCD屏所需的控制时,然后从VIDEOMUX送给LCD屏。TIMEGEN包含可编程逻辑,可通过程序进行设定。TIMEGEN能产生不同LCD屏驱动电路所需要的时序信号。

linux相关文章:linux教程
声控灯相关文章:声控灯原理 摄像头相关文章:摄像头原理









评论