基于嵌入式Linux 的I2C设备驱动程序的分析
0 引言
由于I2C总线的通用性,Linux作为一款优秀的嵌入式操作系统,也必须要对其要有很好的支持。在Linux内核源码中对I2C总线的驱动是基于总线设备驱动模型的,其驱动程序用到了特殊的几个数据结构,对I2C总线协议进行了更抽象更通用的定义,极大的增加了设备驱动的可移植性。要编写出自己的I2C 设备驱动程序,必须对这种内核I2C总线驱动的架构有深刻的理解。
1 I2C总线的硬件构成
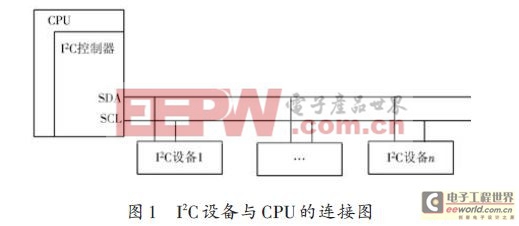
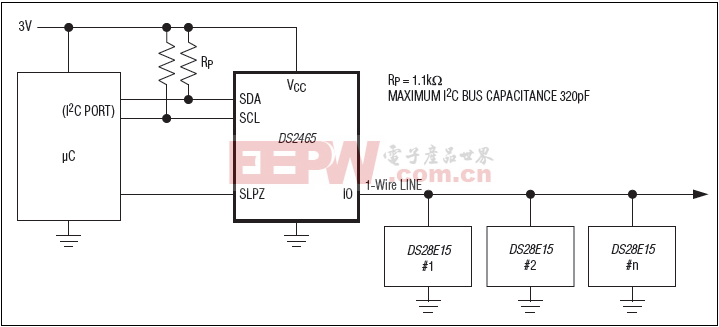
I2C 总线协议只有两条总线线路,一条是串行数据线(SDA),一条是串行时钟线(SCL)。SDA 负责数据的传输,SCL 负责数据传输的时钟同步。I2C 设备通过这两条总线连接到处理器的I2C总线控制器上,不同设备之间通过7 位地址来区别,而且数据的传输是双向的,方向的确定由1位二进制数确定,地址位加方向位是操作I2C 设备的惟一标示,I2C 设备与CPU 的连接如图1所示。
I2C 总线上有3 种类型的信号,分别是:开始信号,结束信号和应答信号。这些信号都是由SDA和SCL上的电平变化来表示的。
开始信号(S):当SCL为高电平时,SDA由高电平向低电平跳变,表示开始传输数据。
结束信号(P):当SCL为高电平时,SDAY由低电平向高电平跳变,表示结束传输数据。
相应信号(ACK):从机接收到8位数据后,在第9个时钟周期,拉低SDA电平,表示已经接收到数据。
当总线空闲时,SDA 和SCL 都处于高电平,主机检测到总线空闲就可以向从机发送数据。主机首先发送开始信号S,接着发出8位数据(包括前7位的从机地址和1 为的方向位),然后等待从机发回确认信号ACK.
当第8位为0时,表示向从机传输数据,主机收到确认信号后就可以连续的向从机写入8 位数据;当第8 位为1时,表示向从读取数据,这时主机就可以接收来自从机的一系列数据。最后当总个数据传输过程完成后,由主机发送结束信号P,表示本次的数据传输完成。
2 Linux 的I2C设备驱动程序的层次结构
因为I2C设备的种类繁多,如果为每一款I2C设备都编写一个驱动程序,显然不太现实也不太可能做到。所以,Linux中是对I2C 设备驱动采取了层次化处理,分为总线层和设备层。将I2C设备驱动的一些共同属性抽象起来归结起来作为总线层,而将具体I2C设备特殊操作作为设备层。在Linux中I2C设备驱动中用到的数据结构[4,7-8]的关系如图2 所示。关于这部分代码位于Linux内核源码树的/driver/i2c中。
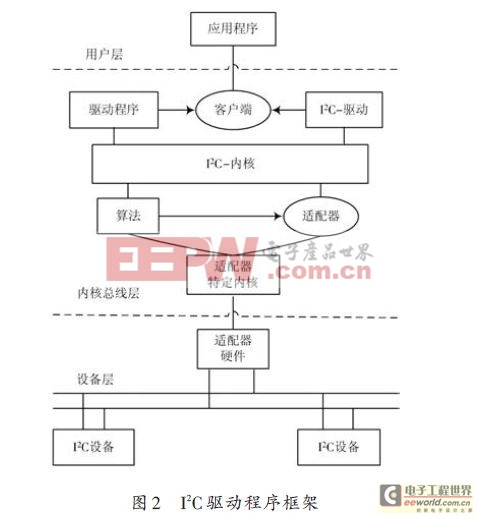
理解这层次结构重点是要理解4个数据结构,分别是属于设备层的i2c_driver 与i2c_client,属于总线层的i2c_adapter与i2c_algorithm.下面分别对这四个数据结构做简要的说明。
struct i2c_driver:具体的每一个I2C设备都应该对应着的一个驱动,这个结构体里面定义了Linux设备模型中用于I2C 总线管理的一系列函数指针和I2C 设备的信息。其中最重要的两个成员是适配器检测函数指针at-tach_adapter,和设备ID表id_table.
struct i2c_client:一个连接在SDA 和SCL 总线上的具体设备是由i2c_client结构体描述的,定义了两个成员变量表示这个具体设备所对应的适配器和驱动。
struct i2c_adapter:此结构体表示CPU 里面具体的I2C控制器,本质上也是对应着一个物理设备,其中最要的成员变量是指向适配器驱动的程序的algo 结构体指针。
struct i2c_algorithm:里面定义了具体适配器驱动程序的函数指针。特别是master_xfer函数指针,这个函数实现了适配器最底层的操作方法,也是I2C设备驱动中总线层里面要编写的重要函数。
linux操作系统文章专题:linux操作系统详解(linux不再难懂)
linux相关文章:linux教程










评论