基于MLX90316的磁性角度传感器的设计方案
4.硬件电路设计
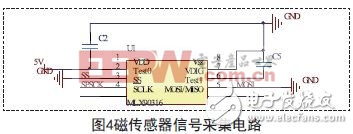
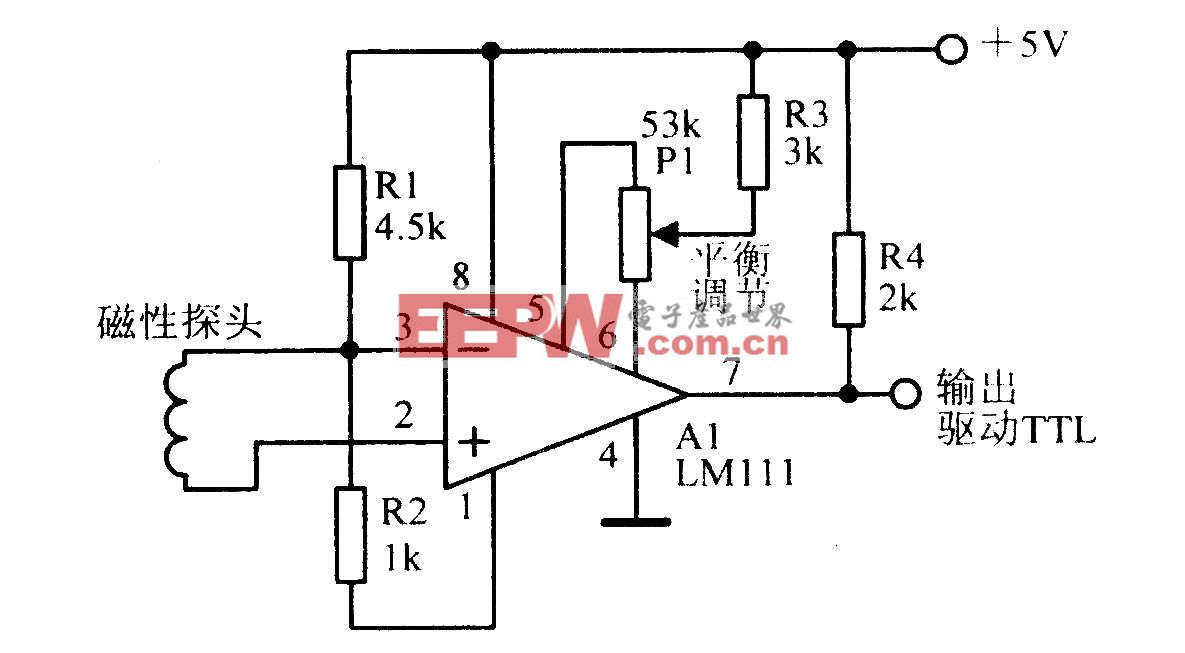
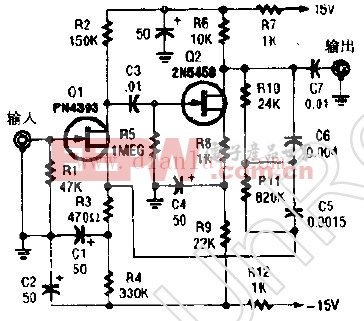
硬件电路的核心是磁传感器信号采集模块,它主要是利用磁传感器芯片MLX90316 来实现的,它可以把磁场的变化转化为角度信息。信号采集电路如图4所示。
MLX90316芯片是集成了Tria 度isTM型的CMOS霍尔传感器,当外加磁场的分量与芯片表面平行时则可输出两路正交磁场信息,根据这一特点可以获得对应的角度位置信息,它的内部结构如图5所示。
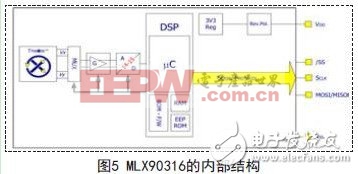
当小型磁铁(径向磁化)在芯片表面上方旋转时,MLX90316芯片内的集磁片(IMC)可以将平行作用于芯片表面的磁场集中起来,并在IMC结构的边缘产生正比于磁场的垂直分量,再通过两对位于 IMC下方的传统平面霍尔元件来检测此信号。这两对霍尔元件的放置方向相互垂直,并都平行于芯片表面(X轴和Y轴方向),通过这样的结构可以将实际角度编码为两个相位差为90°的正弦信号x V 和y V ,并正比于磁场强度。
这两路霍尔信号将通过一个完全差分、带有经典偏移消除技术的模拟处理链进行放大、采样。调节后的模拟信号再通过ADC(可编程为14bits或15bits)转换为数字信号,之后这两个数字信号再通过芯片内部的由DSP实现的反正切函数计算模块来计算角度,计算公式为:
![]()
实际中x V 和y V 还存在式(1)所示的误差表达式:

MLX90316的偏移误差、灵敏度误差和垂直度误差都会对输出的角度信息产生较大的影响。虽然芯片内部使用了动态偏移电压消除机制,并且可以在一定程度上通过芯片内置的DSP 模块来调整它们之间的正交性,但这些误差仍会反应在传感器的输出信号上。通常由芯片本身所产生的误差在0.3度以内。
传感器输出的表征当前角度值的信号可以以串行数字通信(SPI)方式输出,也可再通过D/A转换器变回模拟信号,以PWM模式或模拟量形式输出。为了满足设计电路的结构简单、成本低等要求,这里选择的是SPI输出模式,避免了模拟输入带来的额外误差源。
5.系统软件设计
由于MLX90316所获得的角度信息是以SPI模式输出的,因此程序设计的关键就是SPI通信的实现。SP总线接口是一种同步串行外设接口它是是一种由4根信号线构成的串行接口协议。这4根信号线分别是:时钟线(SCK)、数据输入线(MISO)、数据输出线(MOSI)和从设备使能线(SS)。SPI接口中,MC9S08DZ60作为主控端,MLX90316作为从属端。SPI通信模块主要让 MC9S08DZ606读MLX90316输出的数字信号。
SPI的通信过程为:主控端先输出一个0xAA以及一个0xFF作为通信起始信号,接着输出8个0xFF,而从端会同时输出2个0xFF、4个字节的角度信号以及4个0xFF,从而完成一次数据通信。具体的通信时序如图6所示,软件流程如图(7)所示。







评论