基于STM32的跌倒防护装置研究
2.2 加速度计
加速度计属于惯性感测元件,可测量物体的加速度。本系统选用亚德诺半导体公司的一款小而薄的超低功耗三轴加速度传感器ADXL345本设计中加速度传感器与单片机STM32F103RBT6采用I2C总线连接方式,测量范围+16 g,使用最大分辨率(13位),数据输出速率100 Hz。初始化主要对ADXL345的数据输出速率、测量范围、分辨率、数据的对齐模式以及中断触发方式进行设置。
2.3 陀螺仪
陀螺仪,是一种用来感测与维持方向的装置。本系统中选用意法半导体公司可以让用户自主设定量程,提供一个16位数据输出的三轴陀螺仪L3G4200D。本设计中L3G4200D使用I2C数字接口与单片机STM32F103RBT6相连,量程使用±250 dps,数据速率100 Hz,初始化主要对L304 200D的量程、数据速率的进行设置。
2.4 无线传输模块
系统加入无线通信模块,在验证算法时开启无线通信,系统实时处理采集到的传感器数据,并将数据通过无线模块发送至上位机进行处理。本系统中使用Nordic公司电流消耗极低的RF24L01模块。模块与STM32单片机采用SPI方式连接,初始化主要对通信通道,通信频率,数据宽度和收发模式进行设置。
3 软件设计
本系统中是选择穿戴式传感器的方法设计跌倒探测器。由于腰部活动范围和频率都较小,一般都保持竖直位置,有利于检测且舒适度高,因此将装置佩戴在腰部。下面我们应用三轴加速度和角速度信号对人体的跌倒检测技术进行研究,并详细论述跌倒检测算法。
3.1 算法设计
人体加速度向量幅值SVM判断法是研究人体跌倒的常见方法。SVM通过计算加速度幅度反应人体运动的剧烈程度,其值越大说明运动越剧烈,其定义如式(1)。
式中,αx、αy、αz分别为加速度传感器的X、Y、Z三轴输出,单位为g。
采用该特征值的优点在于其将空间的加速度合为一矢量,在跌倒判断中忽略跌倒的方向。因为发生跌倒时,无论朝哪个方向,SVM都会超过某一阚值。而本系统使用的加速度阈值判断法的的核心就是检测人体的SVM的大小,从而判断加速度是否超过正常范围。下面对加速度阀值确定进行研究。
图2是经过试验得到的人体跌倒过程中的合加速度曲线。在跌倒过程中产生2个极值分别是图2中第75个采样点和第85个采样点。第85个采样点合加速度约为5.3g,这是由于人体跌倒时与地面碰撞产生的加速度,其幅值要比绝大多数日常活动产生的加速度幅值都要大,因此,许多人体跌倒检测的算法都是根据这个幅值来判断。本文引用地址:http://www.eepw.com.cn/article/192863.htm
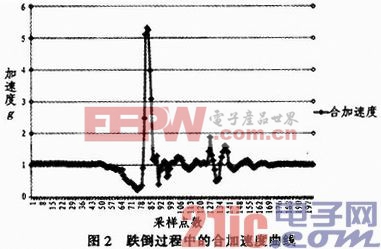
但是此幅值来判断的跌倒检测算法人体已经着地,跌倒伤害已经产生了,而本系统需要对人体进行保护,即必须在人体跌倒着地之前进行检测,因此不符合本系统的设计要求。经过多次试验找到符合本系统要求的过程(图2中从第50到第75个采样点左右),该过程一直呈下降趋势直到合加速约为零,且该过程也明显区别于日常动作。本系统中把合加速度的阈值设为0.88 g,当合加速度小于0.88 g时,系统进入预警状态,初步判定有可能发生跌倒,但是也有可能是突然站起或转身等正常动作引起的。由于该过程一直呈下降趋势,因此设计中将本次加速度的值与上一次的加速度值做差如果差值小于零计数,当计数值达到一定值的时候就可以判断人体发生跌倒。
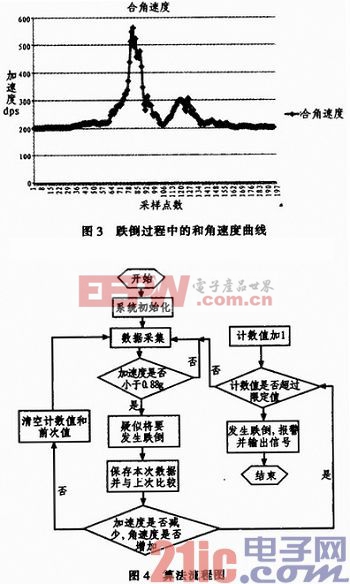
图3是经过试验得到的人体跌倒过程中的合角速度曲线(与图2同一时刻)。通过试验得到当合加速度值小于0.88 g至刚好着地的这段过程时(图2中第55至第75个采样点),陀螺仪检测的角速度却是增大的。但是实际观察多次跌倒的角速度波形,发现跌倒时角速度并不是线性增加的,它有时候也会减小,但是总体是增加的。根据M.N.Nyan,Francis E.H.Tay,E.Murugasu等人的研究,在这一时段角速度的变化很小只有10°/s。于是在算法判断加速度减少并计数的同时加入角速度做差值且是否变化在10°/s内。实验中我们发现通过同时满足加速度减小和角速度增加并计数能明显减少单一运用加速度计的误判。



评论