基于DSP的磁流变减振模糊控制系统设计
3 软件设计
(1)主程序。
系统主程序主要完成对系统各个模块的初始化、调入模糊控制查询表,其中初始化主要完成设置系统硬件及软件所需的初始参数和初始的状态,以保证系统的各个模块能正常工作。程序首先禁止所有中断,以防止程序在系统未正确初始化的情况下调用了中断服务子程序。初始化结束后将事先离线计算所得的模糊控制查询表存入数据存储器,供执行控制算法时查表使用,模糊控制查询表也可在程序开始时存入数据存储器,最终输出控制量。
(2)数据采集。
先设置定时器控制器GPTCON、控制寄存器1、控制寄存器2,然后进入A/D中断服务子程序,由EVA模块的定时器1的周期中断触发A/D转换。在 A/D中断服务子程序中,首先读取A/D转换结果,并将结果存放于数据存储区的指定区域,供模糊控制算法查表使用,然后执行控制算法程序。
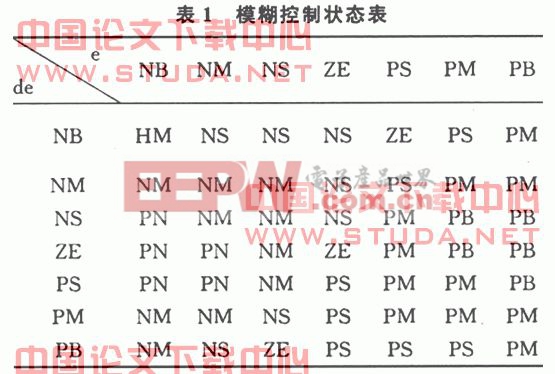
(3)模糊控制规则表。
由实验测试知,减振系统相对位移为[-5,5]cm,加速度值为[-4,4]m/s2,输出磁流变阻尼器的工作电流取为[0,2]A。设定模糊系统输入和输出数值的论域都为[-1,1],对车身垂直方向加速度及其变化率、减振器的输入电流进行正则化处理,使其论域均为[-1,1]。
设车身垂直方向加速度为A、垂直方向加速度变化率为ΔA、减振器输入电流为I,正则化处理方法为:AP=K1AΔAP=K2ΔAPI=K0IP
式中,K1、K2、K3为相应的量化因子。
对A、AP定义 7个模糊语言值:负大、负中、负小、零、正小、正中、正大,分别用 NB、NM、NS、ZE、PS、PM、PB表示,
IP的7个模糊语言值为:零、小、小中、中、小大、中大、大,分别用 NB、NM、NS、ZE、PS、PM、PB表示。
根据参考文献和实际操作经验,得出响应的控制策略,本文减振控制系统的控制规则共有49条,建立如表1所示的模糊控制状态表。
模糊推理的结果是模糊量,不能直接控制被控对象,需要将模糊量转化为精确值。本文采用重心法实现去模糊化。








评论