一种基于TS201的归一化互相关快速算法
2.2 多模板方案
递推多模板方案的快速算法需要解决的另一个重要问题是匹配子图的数据准备问题。有两个不利因素导致产生此问题,一个是匹配子图数据准备过程重复进行(M-m)×(N-n)次,占据了大量处理时钟;另一个由式(2)的分析可知,算法运行过程中,每次相关匹配运算需要将实时图数据块与匹配子图数据块中的像素一一对应进行乘法运算。由于TS201自身只支持32位取值(字取值),所以无法将直接获取数据的方法获得的起始像素不位于字首的匹配子图数据块用于计算,也即不能利用DMA使用双缓冲的常规方式准备数据。
本文采用多模板计算方案来解决匹配子图数据的准备问题。
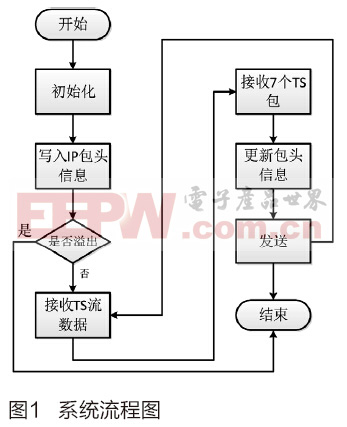
多模板计算方案首先将处理器定位于4字取值工作模式,加载并行指令,使处理器的计算能力最大化;其次将实时图予以适当的横向放大,构建多个与匹配子图等高的大实时图块,并分别在大实时图块范围内将真实实时图像数据进行逐点平移,与预匹配子图像素相对应,非真实实时图像素位置零,如图1、图2所示。本文引用地址:http://www.eepw.com.cn/article/187871.htm

以图2为例,上半部分图像为构建的大实时图块,大实时图块中连续像素“4”点集为起始像素不位于字位上的真实模板图像;下半部分图像为大实时图块对应的大匹配子图,大匹配子图中连续像素“4”点集为真实实时图对应的起始像素不位于字位上的真实匹配子图。将这两个扩大后的数据块各个像素对应相乘并累加,其结果即为真实实时图与真实匹配子图对应像素的乘累加结果。这样做不仅建立了两个图像数据块各个像素间的对应相乘关系,而且也解决了起始像素不位于字位数据块的数据获取问题。
构建的这些大实时图块可直接与基准图像上对应的放大子图进行相关计算,省去匹配子图数据的重复准备过程,以适当增加计算量的方式消去了多次重复数据准备占用的处理周期。配合4字处理工作模式,只需在算法运行的初期一次性地构建16个(m+16)×n的大实时图块,即可与全部匹配子图进行相关运算,而原有的匹配子图数据准备模式则需要构建(M-m)×(N-n)个m×n像素的图像块。
3 实验结果
对使用汇编语言和递推多模板方案构建的归一化互相关快速算法进行测试。输入由红外图像拉伸而来的128×128像素的8位基准图像和64x 64像素的实时图像,如图3所示。

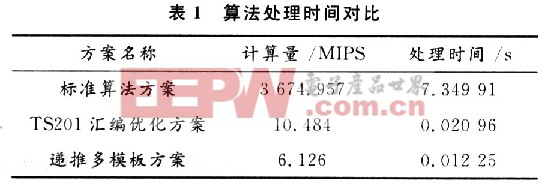
使用TS201处理器的运行快速算法。可以精确获得实时图像匹配坐标,运算时间统计结果见表l。
4 结语
结合ADSP-TS201处理器特性,构建了递推多模板最大互相关快速算法。实验证明,该快速算法较常规算法的执行时间明显缩短,执行效率提升较高。







评论