基于16位单片机的智能车控制系统设计
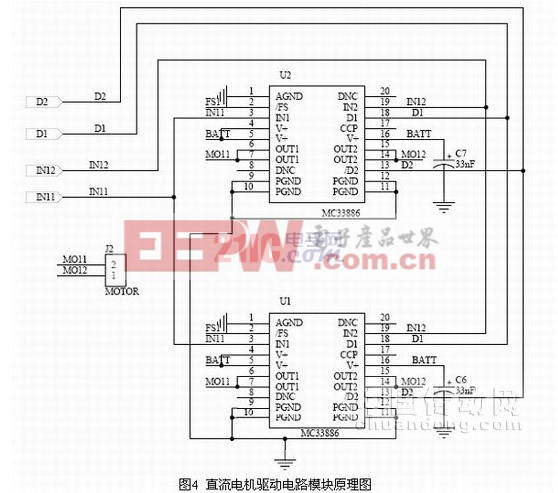

图3为经过简化的H桥电路,当S1、S4 导通且S2、 S3 截止时,电流正向流过直流电机,智能车前进;当S2、S3 导通且S1、S4 截止时,电流反向流过直流电机,适当利用这个过程可以使车模处于反接 制动的状态,迅速降低车速;当S3、S4导通且S1、S2 截止时,没有电源加在直流电机上,直流电机电枢两端相当于短接在一起。由于电机轴在外力作用下 旋转时,电机可以产生电能,此时可以把直流电动机看作一个带了很重负载的发电机,电机上会产生一个阻碍输出轴运动的力,这个力的大小与负荷的大小成正比, 此时电机处于能耗制动状态。
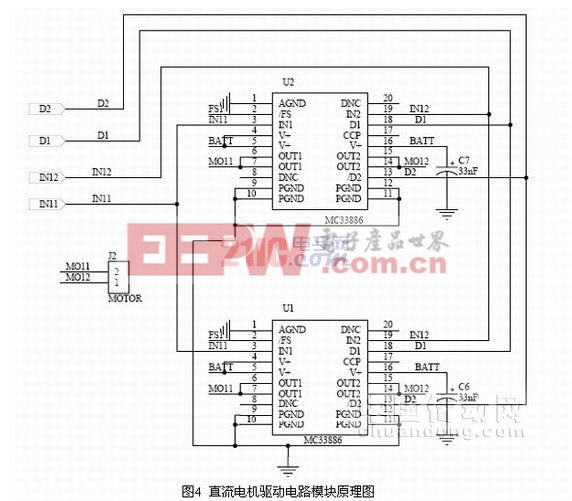
本设计方案中采用两片MC33886并联,一方面减小导通电阻对直流电机特性的影响,另一方面减小MC33886内部的过流保护电路对电机启动及制动时的影响。直流电机驱动模块电路原理图如图4所示。

(3)传感器电路设计。智能车采用CMOS摄像头作为图像传感器,保证赛道信息采集准确有效。CMOS摄像头的输出信号是PAL制式的复合全电视 信号,每秒输出50帧(分为偶场和奇场)。当CMOS摄像头采集图像时,偶场和奇场不是同时采集的,因此,可以在每场信号都对路径进行识别。

pid控制器相关文章:pid控制器原理









评论